LSI – Large Signal Identification#
LSI - Tutorial#
What is the goal of this tutorial?#
This tutorial makes you familiar with the Large Signal Identification module, dedicated to measure large signal parameters on the Klippel Distortion Analyzer.
Since this measurement goes far beyond the well-known Thiele-Small Parameters, valuable information can be gained by analyzing the driver at high displacements.
The tutorial is divided into three parts:
- Part 1: Viewing Results
will examine existing results of the web example database that comes together with the software.
- Part 2: Do your first Measurement
will guide you through your first measurement, which runs almost automatically.
- Part 3: Customizing the measurement
gives valuable background information on customizing the measurement according to your needs.
See also
Additional instruction and knowledge to get familiar with the software module can be found at the: KLIPPEL Online Trainings
Visit KLIPPEL Online Training #3 Loudspeaker Nonlinearities for easy step-by-step instructions, basic theory and advice on how to interpret your measurement results correctly. The training consists of a short video and a handout. At the end of the training, you can check your knowledge by doing a multiple choice test.
Part 1: Viewing Results#
What happens at high displacements?#
At higher amplitudes loudspeakers produce substantial distortion in the output signal generated by nonlinearities inherent in the transducer. The LSI allows to identify these nonlinearities and relate them to physical mechanisms, particular design, material properties and assembling techniques of the transducer.
The model used to describe the large signal behavior is closely related to the small signal model:
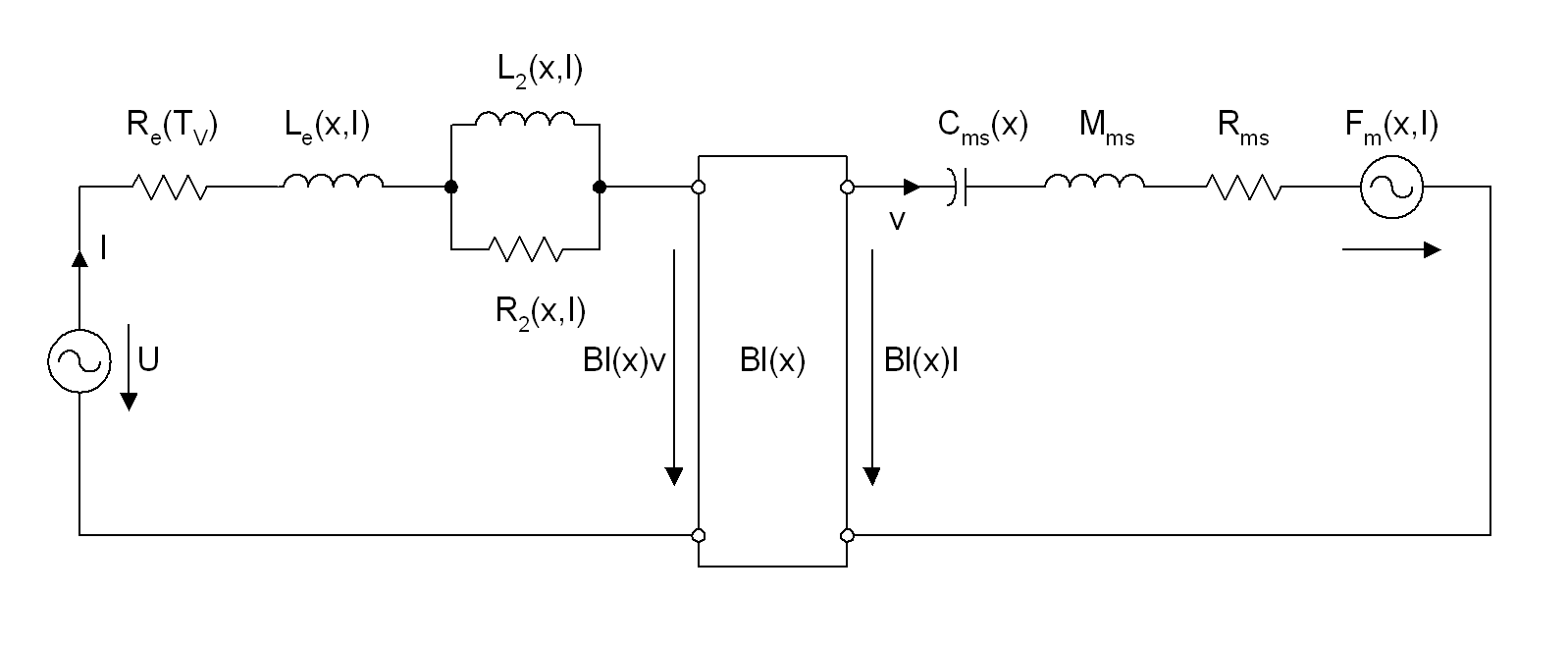
The main nonlinearities can be described by the variation of inductance, force factor, and compliance over displacement. The LSI can identify additional nonlinearities (not all shown here), and the thermal behavior of a transducer. You find a more detailed discussion in the LSI-Reference, and additional material on our website.
Bl(x) Force factor#
Example data used in this manual is stored in the Web Example database. If not downloaded already, get it from the latest R&D release <https://www.klippel.de/go/current-rnd-release> and open the web-based database.
See also
View Results for general information on how to download this database, open and view results in dB-Lab.
Open the operation Transducer Parameter Identification (FLSI, LSI, LPM, MMT, MSC, BAC, IMP)Multimedia Woofer (LPM, LSI)3 LSI Small Woofer to display the most important windows. (see dB-Lab Tutorial for more information)
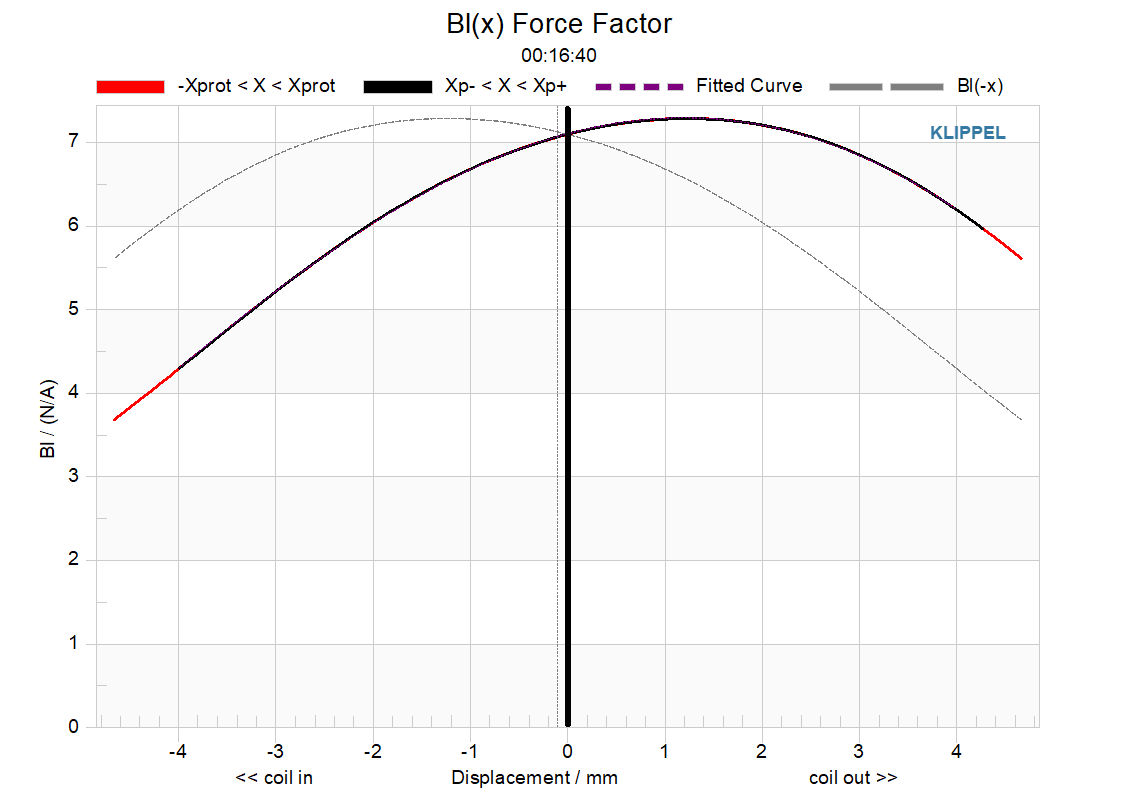
The electrodynamic coupling factor, also called \(Bl\)-product or force factor \(Bl(x)\), is defined by the integral of the magnetic flux density \(B\) over voice coil length \(l\), and translates current into force.
In traditional modeling this parameter is assumed to be constant. The force factor \(Bl(0)\) at the rest position corresponds with the \(Bl\)-product used in linear modeling.
The red curve displays Bl over the entire displacement range covered during the last second from actual time cursor position. You see the typical decay of \(Bl\) when the voice coil moves out of the gap.
At the end of the measurement, the black curve shows the confidential range (interval where the voice coil displacement in this range occurred 99 % of the measurement time). During the measurement, the black curve shows the current working range.
The dashed curve displays \(Bl(x)\) mirrored at the rest position of the voice coil – this way, asymmetries can be quickly identified.
Since a laser was connected during the measurement, a coil in / coil out marker is displayed on the bottom left / bottom right.
Kms(x) Stiffness#
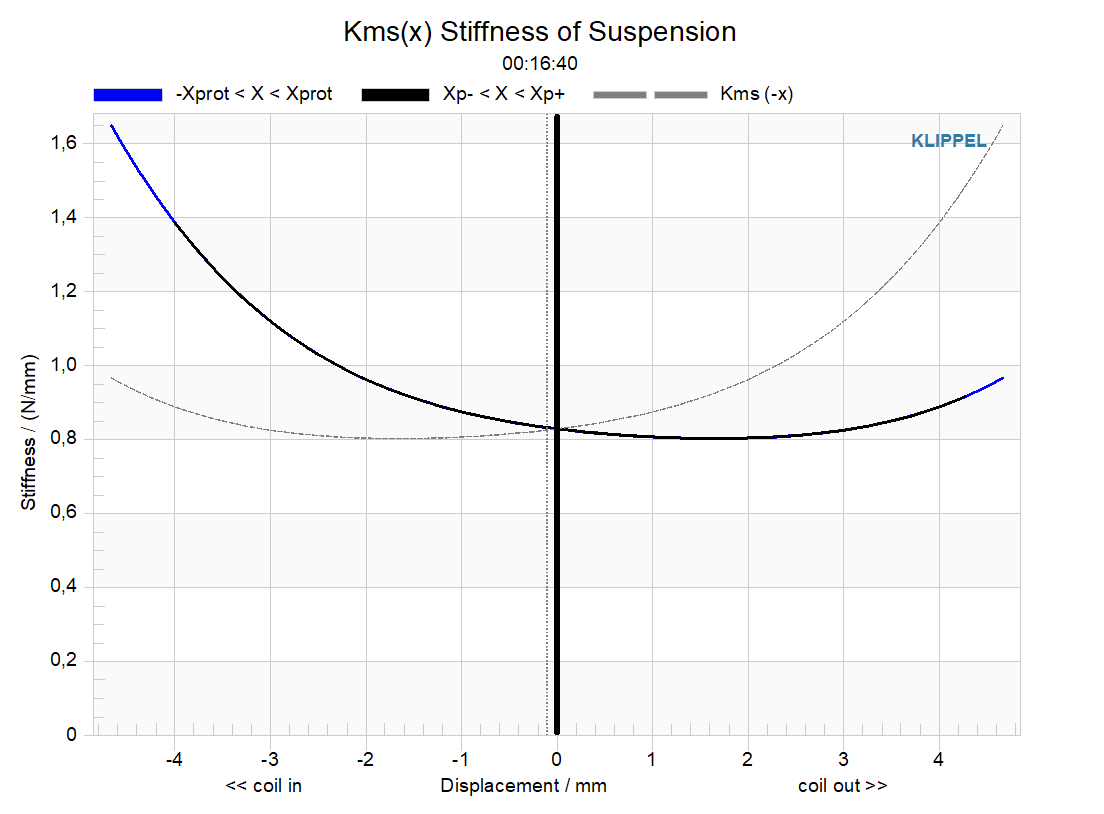
The stiffness \(K_{\text{ms}}(x)\) describes the mechanical properties of the suspension. It’s inverse, the compliance \(C_{\text{ms}}(x)\), is also available as result window.
Le(x) Inductance#
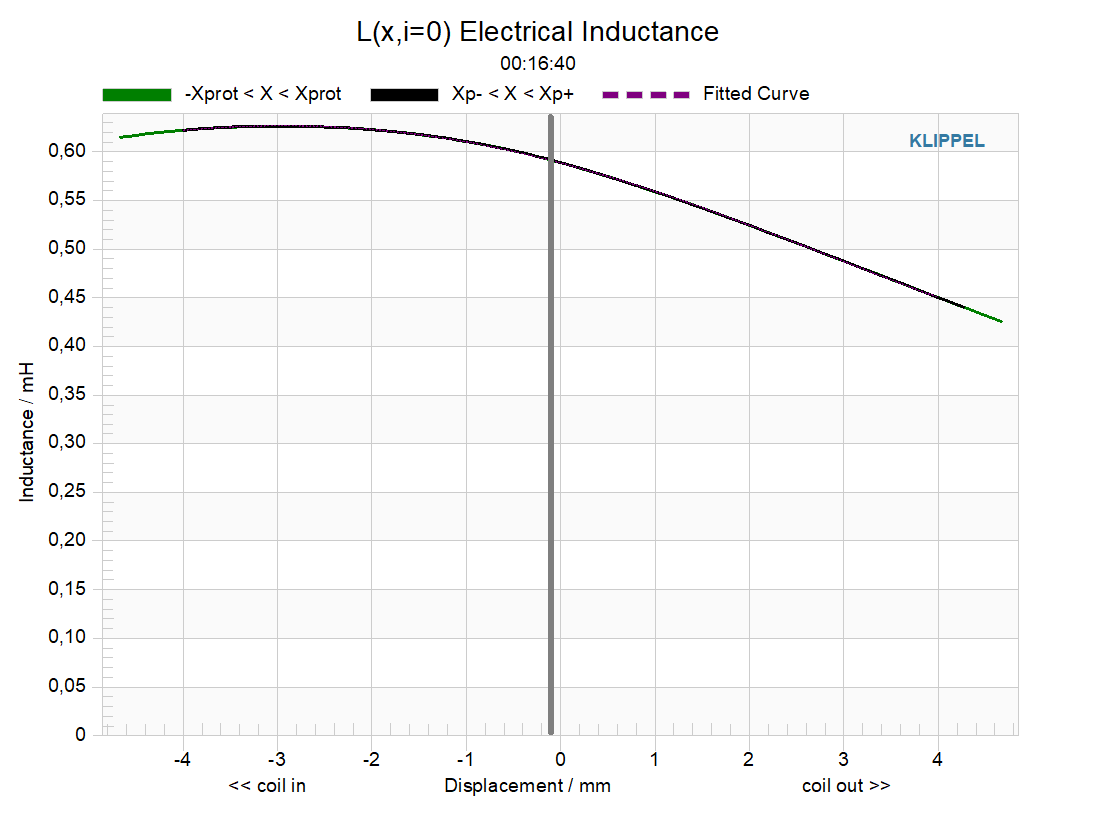
The electrical properties of the voice coil is described by the inductance \(L_{\text{e}}(x)\), the DC resistance \(R_{\text{e}}(T_{\text{V}})\), and the parainductance \(L_{2}(x)\) and \(R_{2}(x)\), describing the effect of eddy currents in the conductive parts close to the voice coil.
The inductance \(L_{\text{e}}(x)\) of most drivers has a strong asymmetric characteristic. If the voice coil moves towards the back plate the inductance usually increases since the magnetic field generated by the current in the voice coil has a lower magnetic resistance due to the shorter air path.
Additional results#
Click the Close All Windows button  in the result window list, then double-click the LSI – Large Signal Identification (Pro) operation in the project window. This opens the default windows for the operation - the major nonlinearities, plus the Temperature, Power result window (\(P\) , \(T\) over time).
in the result window list, then double-click the LSI – Large Signal Identification (Pro) operation in the project window. This opens the default windows for the operation - the major nonlinearities, plus the Temperature, Power result window (\(P\) , \(T\) over time).
You see that the result window list in the lower left has more results available than the LSI Standard measurement.
Open the \(f_{\text{s}}(x)\) Result window:
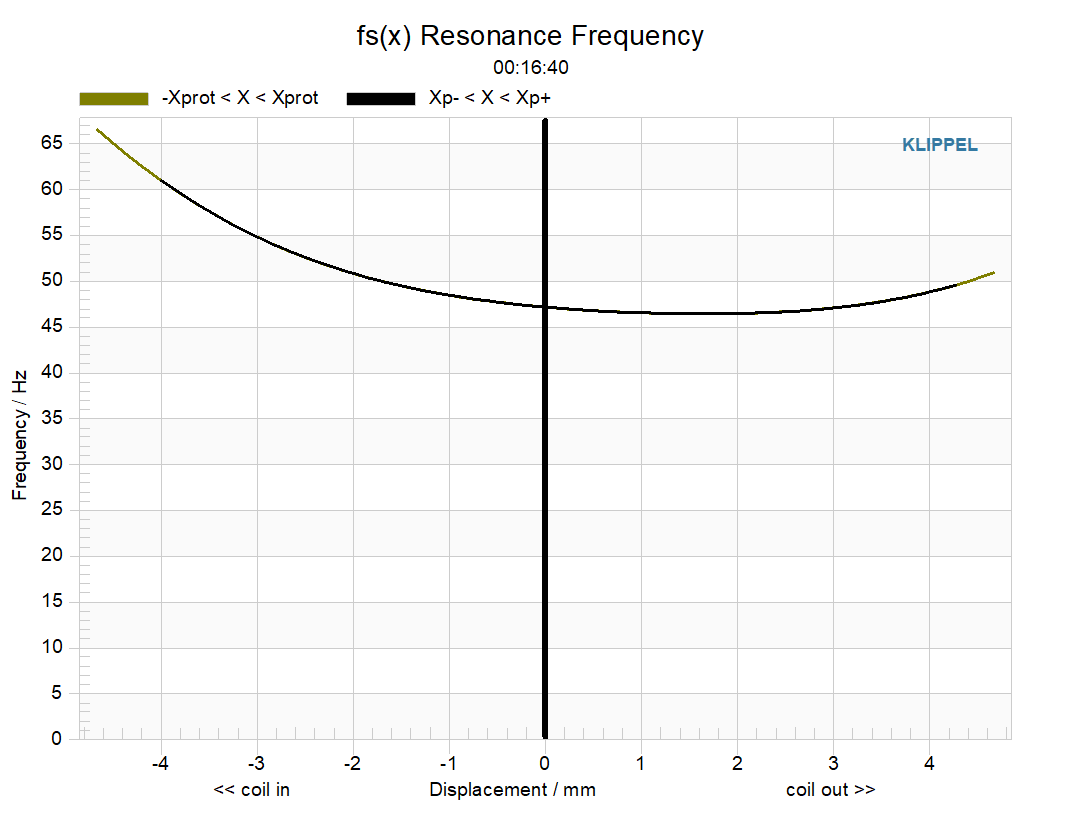
You see the increase of the resonance frequency due to increased stiffness at higher displacements.
For details of the additional results available, please refer to the LSI-Reference or the LSI specification.
Viewing the History#
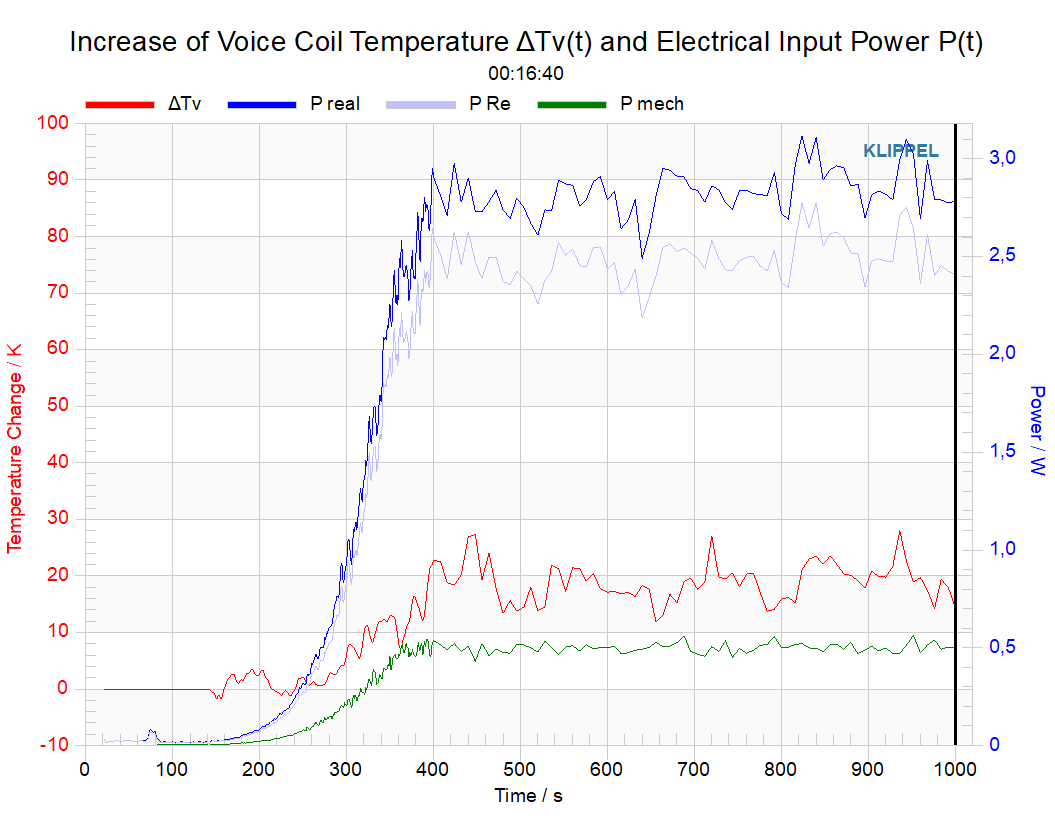
This result window shows the increase of the voice coil temperature \(\triangle T_{\text{V}}\) and the electric input power \(P(t)\) versus measurement time, and different powers related to the thermal model.
You also see a bold black time cursor to the far right. You can drag it with the mouse, or click into the chart and move it with the Cursor LEFT / RIGHT keys ◄ / ► while holding down Ctrl-key.
When you move the time cursor around you see the other windows change their display to reflect the state of the driver at the selected time. This allows you to review the identification process, and the changes of parameters over time with increasing amplitude.
The time cursor is available in all windows where \(x\)-axis denotes measurement time.
Nonlinear Parameter, Displacement Limits#
Open the Nonlinear Parameters result window. It contains a table with important nonlinear parameters, such as the polynomial coefficients for the \(Bl(x)\) , \(L_{\text{E}}(x)\) and \(C_{\text{MS}}(x)\) curves, and the displacement limits.
Parameters like these can be exported to the clipboard on the IM/EXPORT property page.
Part 2: Do your first Measurement#
Setting up the Hardware#
Note
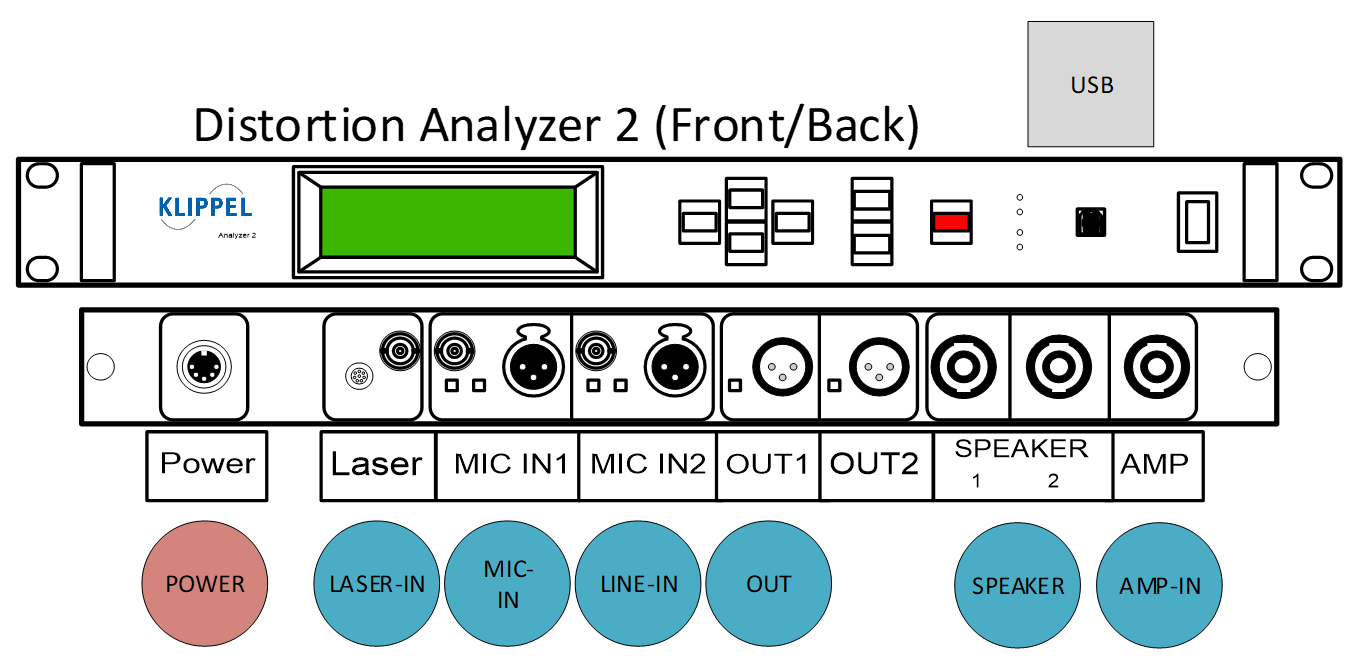
Relevant connectors are at the backside of the device (except USB).
Connect the Distortion Analyzer with the power supply delivered by KLIPPEL.
Connect OUTPUT 1 (XLR, symmetric signal) to the input of your power amplifier. This cable is not distributed by KLIPPEL since there are too many Amplifier input connectors available on the market. Please use you own specific cable.
Connect the Amplifier output to the Speakon connector AMPLIFIER of the Distortion Analyzer.
Mount the driver in the driver stand or in a baffle.
Connect Speakon connector SPEAKER 1 to the terminals of the driver or loudspeaker. Use the SPEAKER cable (having a Speakon at one end, and clips at the other) coming with the system.
A Laser Displacement Sensor can be connected to the LASER input to enable the identification of the mechanical parameters.
Connect the PC the USB port.
Note
The LSI uses a protection system that adapts well to a wide range of drivers. Before using a very small driver with a low impedance, please see Protection Parameters in Part 3: Customizing the measurement or the Reference for adjusting protection limits and small signal gain.
Warning
The LSI can be used for destructive testing to determine the maximal limits (power, temperature, voltage, displacement) which are permissible for the drive unit. The user is responsible to comply with safety requirements. Note that overload of the driver may cause a fire hazard.
Using a Laser#
Warning
CAUTION LASER RADIATION ! Avoid direct or indirect (e.g. reflection) exposure of human eyes to beam!
See section Laser Sensors in the hardware manual for basic information about laser measurements.
Connect the laser head via the laser controller to the connector LASER at the rear side of the hardware unit.
Make a dot of white ink (correction fluid) on the diaphragm and adjust the Laser to this point.
Ensure that the rest position of the diaphragm is in the middle of the lasers working range.
Starting from dB-Lab#
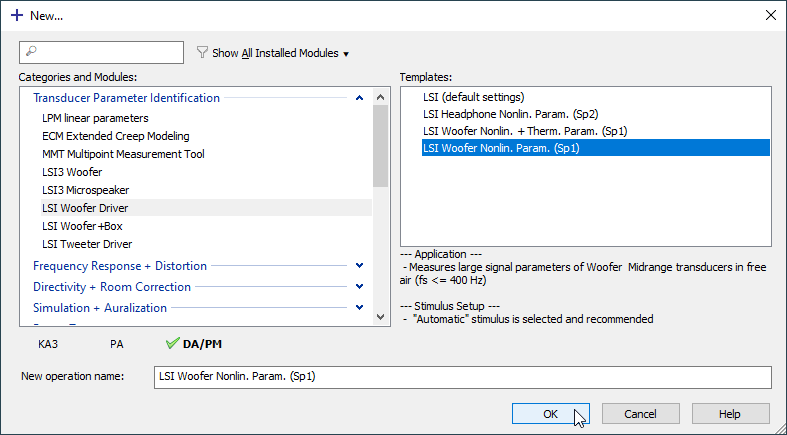
To become familiar with the LSI-module you should start the measurement by using dB-Lab. In dB-Lab, create a new object with an LSI operation. (More information can be found in the dB-Lab Tutorial and reference):
In dB-Lab, click Create/Open Project  select a folder to work in, and click OK. Then click New Object
select a folder to work in, and click OK. Then click New Object  .
.
Note
LSI is available in three different versions (Woofer, Woofer+Box, Tweeter). You can follow this tutorial with any of these as long as you have a license. For more information, see LSI Versions in the Reference.
In the project window, select the LSI operation.
Double click on the LSI operation, to open a default set of result windows. Since no data was acquired yet, the charts are empty.
Make sure the Hardware Unit is set up correctly and connected to the PC using the USB cable.
Verify that the settings on the PROTECTION property page are appropriate for your driver
Warning
Wrong settings can damage your driver. See PROTECTION Page in the reference section for more information. Be especially careful with tweeter and telecommunications drivers.
Make sure polarity is correct. We recommend that positive displacement represent an outward movement of the voice coil.
Click Run
 to start the measurement.
to start the measurement.
The measurement will check the amplifier, and then automatically find the working range based on the default protection parameters. For more information on the protection limits, see Part 3: Customizing the measurement. For more information on the individual steps of the LSI, see Modes of Operation in the LSI reference.
If a laser is connected, coil out and coil in will also be displayed in the respective result windows. Note that this information relies on correct polarity of the laser calibration.
Pause Measurement#
The measurement can be paused at any time by clicking the Pause button  in dB-Lab. To continue, click Pause
again.
in dB-Lab. To continue, click Pause
again.
You can also select STOP from the Processing Unit menu to pause the measurement, and select CONTINUE to proceed.
Finish Measurement#
The measurement can be finished once it reaches the Final Mode (displayed both on the hardware Unit display, and in the State result window). By default the measurement continues to run so you can monitor long-term effects.
Note
The Cancel Operation button  changes to Save/Finish
changes to Save/Finish  when the most important data is available.
when the most important data is available.
To save all data, the measurement should be finished from dB-Lab. If you finish the measurement at the processor unit, the stored measurement data will be lost.
Click the Save/Finish button
, and choose Finish Measurement from the Finish dialog.
Part 3: Customizing the measurement#
Modify the Protection Parameters#
The LSI determines the maximum working range automatically, it uses protection parameters that are adaptive to a wide range of drivers. The default setting is safe for most drivers with 40 Hz \(< f_{\text{s}} <\) 150 Hz, but may be overly protective especially for large ones. For very small drivers (like headphone drivers) you might need to lower the small signal gain, and/or use more restrictive settings.
Select the LSI operation in the project window.
Click View Properties
 , and select the PROTECTION page, where you can change the protection settings
, and select the PROTECTION page, where you can change the protection settingsAvailable Protection Parameters are:
Increase of temperature
decay of \(Bl\) and \(C_{\text{ms}}\)
input power (real)
Note
Smaller values for \(Bl_{\text{lim}}\) and \(C_{\text{lim}}\) give more aggressive measurements.
If you change the protection parameters while a measurement is running, the operation will go back into the Enlargement Mode to adjust the working range based on the new settings.
Import parameters from LPM#
The Large Signal Identification uses only electrical information (current and voltage) at the speaker’s terminals to measure the elements of the pure electrical equivalent circuit and the shape of the nonlinear curve for force factor (\(Bl\)-product), Compliance \(C_{\text{ms}}\) and Stiffness \(K_{\text{ms}}\) as relative quantities, e.g.:
where \(x_{prot}\) is the allowed limit of the displacement detected by the automatic gain adjustment. Thus the relative compliance \(C_{\text{ms, rel}}(x_{rel})\) is displayed in the range \(–1 < x_{\text{rel}} < 1\). At the rest position holds \(C_{\text{ms, rel}}(x = 0) = 1\).
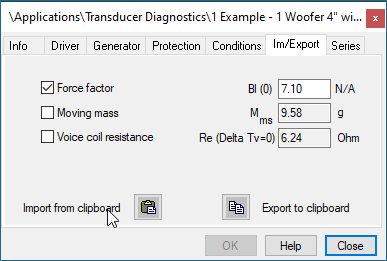
The absolute identification of the mechanical parameters (e.g. \(C_{\text{MS}}\) in N/mm) can easily be accomplished by importing at least one known parameter value (\(Bl(0)\) or \(M_{\text{MS}}\)):
Open the Im/Export tab at the Property Page.
Provide either the parameter \(Bl\) or \(M_{\text{MS}}\) , e.g. from the Linear Parameter Measurement Module (LPM).
The clipboard may be used for the transfer.
Open Property Pape Im/Export in LPM operation and press Export to Clipboard button
Open Property Pape Im/Export in LSI operation, press Import from clipboard button.
Both parameters are imported, but only one is available at the same time.
Note
You can identify the absolute values also by using a laser. However, importing a mechanical parameter is more accurate and robust, as the Linear Parameter Measurement (LPM) is more immune against measurement noise, vibration of the laser stand at high amplitudes and detects certain malfunctions of the laser (like limiting) automatically.
Defining the end of the measurement#
By default, the LSI continues to run after identifying the nonlinear parameters, so you can assess long-term variations of the parameters.
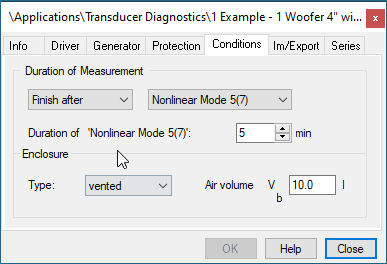
For a predefined end of the measurement, you may specify the mode of operation in the property page CONDITION where the system is supposed to pause:
Open property page CONDITION.
Select Thermal Mode in drop down list Pause after.
Restart the measurement.
After completing the Thermal Mode the measurement will be paused and the message:
Task finished
will be displayed.
You may finish the measurement by clicking Finish/Save
or continue by releasing the Pause button
.
Speeding up the measurement#
The CONDITION page provides ways to expedite the measurement:
If you are not interested in the thermal parameters, you may select the Nonlinear Mode in the property page CONDITION in the modes drop-down list. Or selecting a corresponding template.
If you know that the motor has an equal-length configuration of voice coil length and gap height generating an early decay of the \(Bl\)-product you may shorten the convergence time in the Nonlinear Mode on the CONDITION property page to 1 or 2 minutes without losing accuracy.
Modify test noise#
The property page GENERATOR allows modifying the properties of the noise used as excitation signal.
The automatic setting optimizes the signal towards best identification of the mechanical parameters, by putting all energy around the resonance frequency for high displacements and relatively low heating. For improved detection of thermal parameters and inductance characteristic, you should select a larger bandwidth.
How to get the best performance#
Although the measurement runs almost automatically, the setup parameters accessible on the property pages may be used to optimize performance.
Import Bl(x = 0)#
\(Bl(x=0)\)
Although the mechanical parameters may be provided in absolute terms by using a laser head we recommend to import the \(Bl(x=0)\) via the property page IM/EXPORT. The module LPM – Linear Parameter Measurement is dedicated for providing the force factor \(Bl\) at the rest position \(x = 0\) and for measuring the moving mass. After performing an LPM open the property page IM/EXPORT and press the export button. Select the new LSI, open the property page IM/EXPORT, and press button Import from Clipboard. The \(Bl(x = 0)\) may be imported at any time (before or after the measurement). Available data will always calibrated automatically.
Optimal Noise Bandwidth#
During the parameter measurement the internal model is fitted to the transducer by minimizing the error \(E_{i}\) between estimated and measured current. Typically the error \(E_{i}\) will become below 20 % for most drivers at the end of the Nonlinear Mode. Transducers having a high value of inductance or a non-regular frequency response will cause a higher fitting error that will degrade the accuracy of the measurement. However, by adjusting the spectral properties of the used noise signal this effect can be substantially reduced. Here some guidelines to use optimal setup parameters on the property page GENERATOR:
For woofers use pink noise signal and a cut-off frequency of the low pass \(f_{\text{low}} \approx 20 \cdot f_{\text{s}}\) where \(f_{\text{s}}\) is the resonance frequency of the driver.
For tweeters use white noise and the maximal cut-off frequency \(f_{\text{low}} = 3 \cdot f_{\text{s}}\).
Set the cut-off frequency of the high-pass \(f_{\text{high}} < 0.25 \cdot f_{\text{s}}\) to provide sufficient excitation below resonance.
Optimal Working Range#
The adaptive identification determines parameters giving the best fitting over the working range \(-x_{P} < x < x_{P}\) where the probability of the occurrence of the coil is more than 99 %. This range is about 20 % smaller than the peak displacement \(x_{prot}\) allowed by the protection system.
For this reason, we recommend to adjust the protection parameters in such a way to measure the curves up to \(x_{prot}\) which is 20 % higher than the peak displacement required for further analysis and system design.
Small Signal Amplitude Level#
The LSI measurement procedure starts in the small signal domain defined by the parameter \(G_{\text{small}}\) and the gain of the external power amplifier. The starting amplitude is not very critical in most cases. However, if the level is very low the measurement will be cancelled by an exception error saying that the gain of the amplifier is too small. Contrary, if the gain is too high then the nonlinearities and the heating of the driver will produce some bias in the estimation of the small signal parameters and increase of the voice coil temperature. After the measurement please check the increase of the gain during enlargement mode is within the limits \(12 < G_{\text{large}} < 26 dB\).
How to measure tweeters and mini-loudspeakers#
Some tweeters and special loudspeakers intended for telecommunication have no regular suspension (such as a spider) giving mechanical protection of the voice coil. Here the maximal peak displacement Xmax cannot be detected automatically by monitoring the variation in \(Bl(x)\) and \(K_{\text{ms}}(x)\) as performed successfully for woofers. To protect your driver use the maximal input power \(P_{\text{lim}}\) to find the limits of the allowed working range.
Note
You may change the value \(P_{\text{lim}}\) during the measurement (and the system returns into the Enlargement Mode).
It is recommended to use an appropriate laser sensor during the LSI measurement, which measures the peak, bottom, and mean displacement directly and shows the orientation of the \(x\)-axis (coil in and coil out position). Those results can be compared with the predicted displacement (based on current and voltage monitoring) in the result window Displacement. The predicted displacement describes the dynamic generation of a DC component due to asymmetries in the driver nonlinearities (such as \(Bl(x)\) , \(K_{\text{ms}}(x)\) , …), but cannot reflect a shift of the rest position caused by other causes such as gravity (changing from vertical to horizontal driver position), visco-elastic behavior of the suspension and static air pressure generated by heating of the air sealed below the diaphragm. The shift of the rest position during the LSI measurement is also displayed in the nonlinear parameter windows \(Bl(x)\) , \(K_{\text{ms}}(x)\) , \(L_{\text{e}}(x)\).
LSI-Reference#
LSI Versions#
With the release of LSI 2, three different versions are available:
LSI Woofer, identifying drivers up to \(f_{\text{s}} = 400 Hz\)
LSI Tweeter, for identifying drivers with \(f_{\text{s}} \geq 100 Hz\)
LSI Woofer+Box extending LSI Woofer by allowing measurement in free air or a closed/vented box (2nd or 4th order total mechanical-acoustical system).
The LSI specification provides detailed technical information about the differences. If not stated otherwise, features discussed in this manual are available for all versions. Even though the internal measurement procedures are different, we have kept the user interface as consistent as possible between the versions.
Large Signal Modeling#
At higher amplitudes loudspeaker, headphones and other actuators produce substantial distortion in the output signal, generated by nonlinearities inherent in the transducer. The dominant nonlinear distortions are predictable and are closely related with the general principle, particular design, material properties and assembling techniques of the transducer. The distortion analyzer combines nonlinear measurement techniques with elaborated computer simulation to explain the generation of the nonlinear distortions, to identify their physical causes and to give suggestion for constructional improvements. Better insight into the nonlinear mechanisms makes it possible to further optimize the transducer in respect of sound quality, weight, size and cost.
An electro-mechanic equivalent circuit with lumped elements can model electrodynamic transducers at low frequencies successfully. This model is characterized by Structure, free Parameters and State information. The structure of the model represents the transducer principle and the basic physical mechanisms in the transducer. The free parameters of the model vary with the transducer type and from unit to unit. Finally, the state quantities depend on initial conditions of the actuator such as ambient temperature, mounting condition, acoustic sound field and on the electric excitation signal.
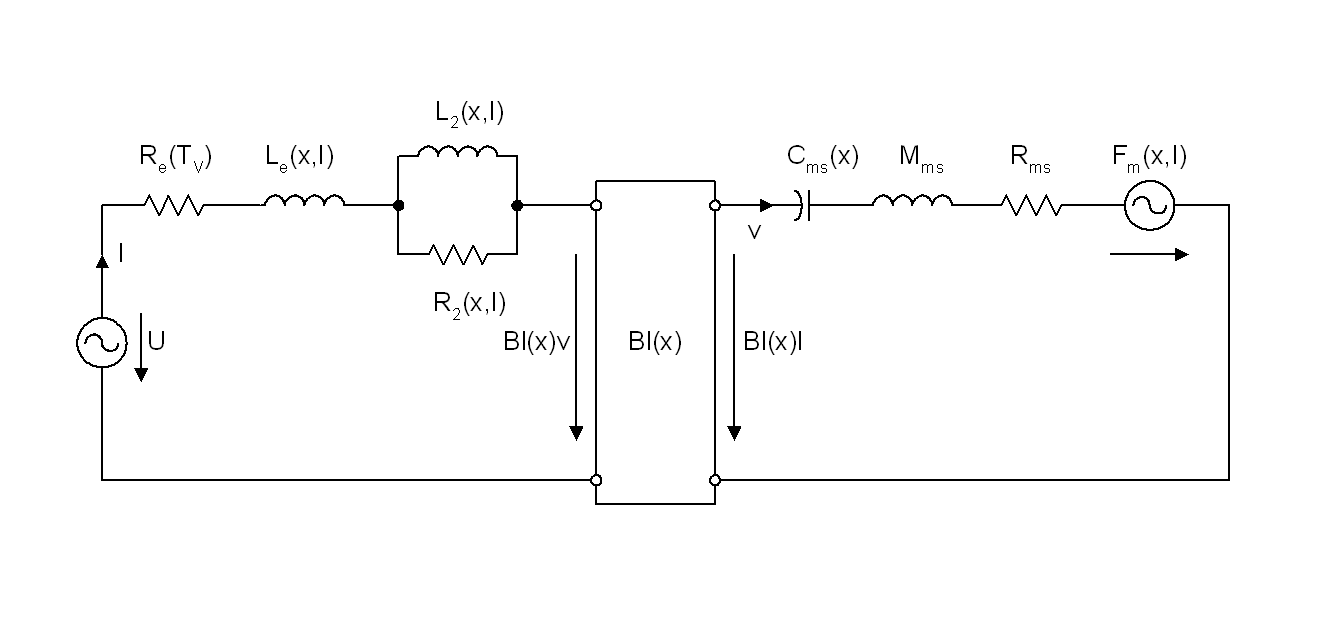 Electro-mechanical Equivalent Circuit
Electro-mechanical Equivalent Circuit
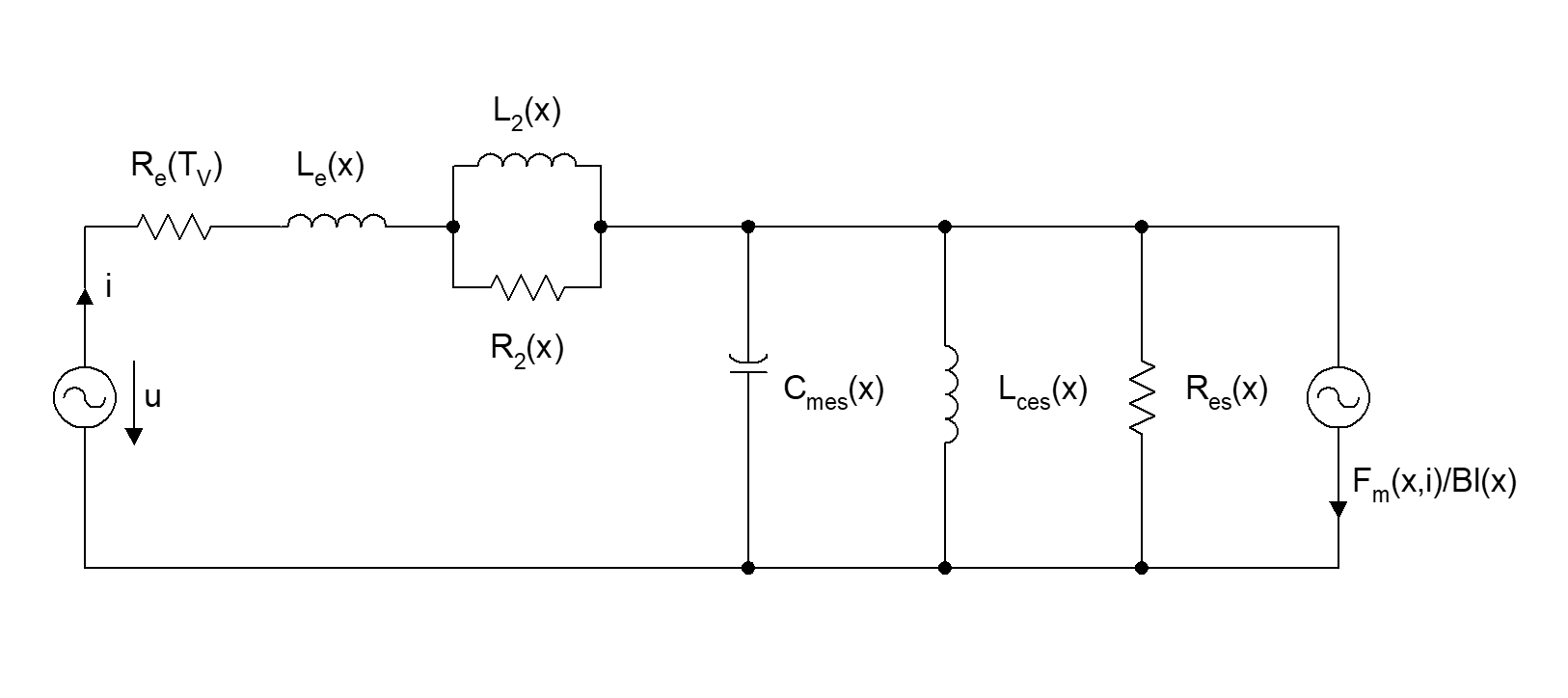 Electrical Equivalent Circuit
Electrical Equivalent Circuit
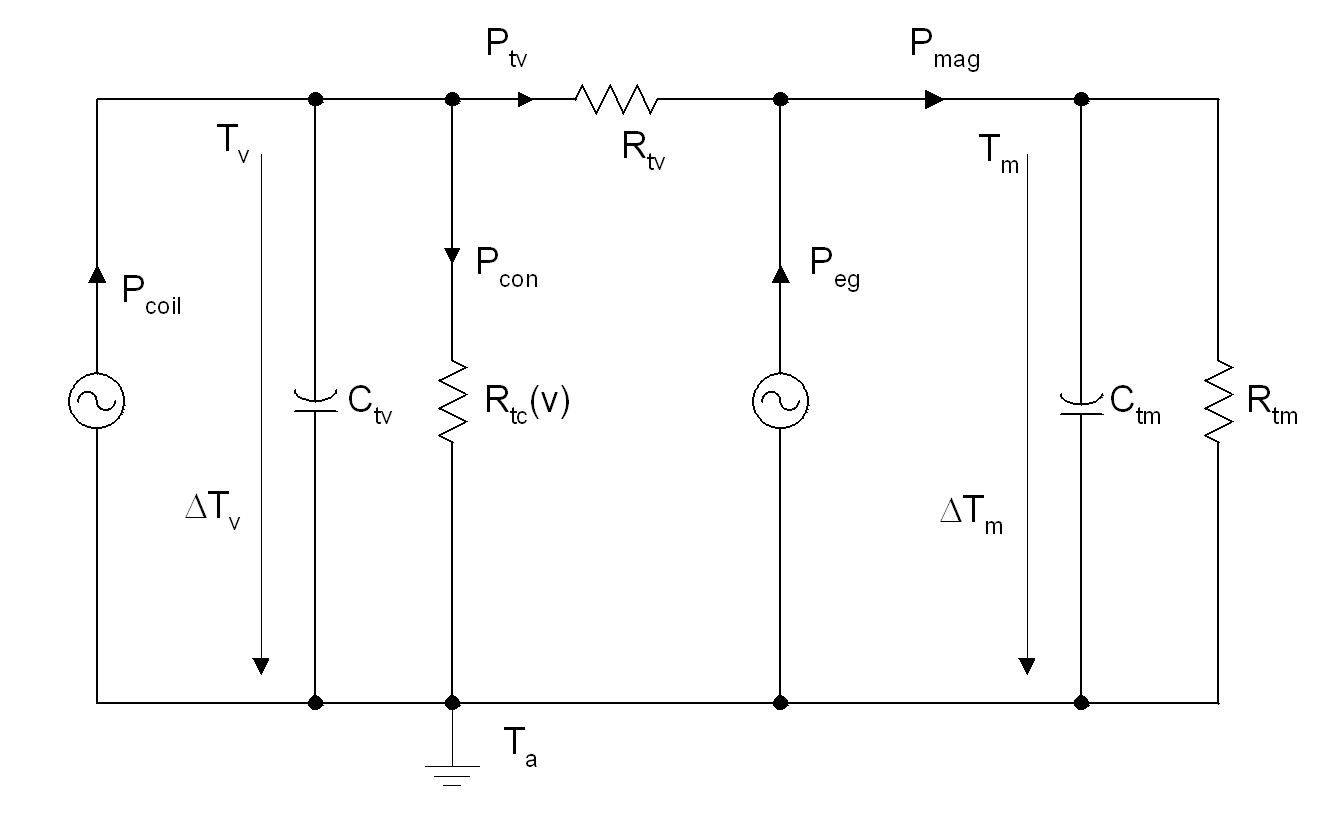 Thermal Model
Thermal Model
The state of the transducer can be described by using the following state variables that are time signals
Some of the lumped elements have parameters that are almost independent on time and on the loudspeaker state and are used as constant parameters in congruence with linear loudspeaker theory.
The dominant nonlinearities are modeled by displacement depending parameters. The force factor \(Bl(x)\) and the inductance parameters depend on the instantaneous displacement only and are almost time-invariant as long as the rest-position of the voice coil is not changed. However, stiffness \(K_{\text{ms}}(x,t)\) of the mechanical suspension is also a function of the preceding displacement time signal to explain fatigue, hysteresis, creep and temporal changes.
The parameter variation due to voice coil excursion generates harmonic distortion and intermodulation distortion products in the transfer band of the transducer. Therefore, these elements have to be considered as nonlinear elements and the varying parameters are referred to as nonlinear parameters.
The electric resistance \(R_{\text{e}}(T_{\text{V}})\) of the voice coil depends on the instantaneous voice coil temperature \(T_{\text{V}}\). However, the temperature \(T_{\text{V}}\) changes slowly and the variations of \(R_{\text{e}}(T_{\text{V}})\) does not generate additional distortion components in the audible band. Therefore, the electric resistance \(R_{\text{e}}(T_{\text{V}})\) can be modeled as a linear, time-varying element.
The thermal resistance \(R_{\text{tc}}(v)\) due to air convection cooling is a function of the voice coil velocity \(v\).
System Identification#
The LSI identifies the parameters and state information of the transducer under normal working condition. In addition to the Thiele-Small parameters that are valid only at small amplitudes novel parameters describe the thermal and nonlinear behavior in the entire working range.
The KLIPPEL R&D System measures the free parameters of the extended loudspeaker model in a full dynamic measurement. The loudspeaker is measured in a normal operating mode while reproducing noise. Optimal parameters are estimated by nonlinear system identification based on adaptive inverse control. Using back EMF-detection the information is derived from the voltage and current available at the loudspeaker terminals reducing measurement errors caused by the acoustical environment and the sensor system.
The identification can run PC controlled, or stand-alone requiring a power amplifier only. The system generates a test signal and monitors the instantaneous states and the parameters of the loudspeaker. In addition to the most important information displayed on a user interface the detailed data is collected in a protocol and can be transferred via the USB interface to a computer for further inspection. During all modes of operation, the measurement system provides the permanent information about the progress and the results of the system identification. A protection system can be activated to keep the peak displacement and voice-coil temperature below a defined threshold (e.g. to protect a unique prototype).
The expanded transducer model with identified parameters is the basis for numerical simulations to predict the nonlinear and thermal behavior of the transducer in different applications (SIM module). Harmonic and intermodulation distortion components can be calculated for any multi-tone excitation signal and compared with measured responses. Simulation of the nonlinear behavior is less time-consuming than the direct measurement and allows an analysis of the loudspeaker’s nonlinearities. The contribution of each nonlinearity to the total distortion can be calculated and thus the source for the dominant distortions can be detected.
This information is crucial for finding the weakest point in the loudspeaker design and to give some indications for constructional improvements. Some of the nonlinearities can be reduced without increasing the cost of the speaker. Asymmetries in the parameter characteristic can be detected and second-order distortion can be reduced by an optimal adjustment of the voice-coil, mechanical suspension and means for the voice-coil inductance.
Measurement Condition#
It is recommended to measure the loudspeaker driver in free air with the loudspeaker axis pointing in horizontal direction to prevent gravity from acting on the moving mass. A special loudspeaker stand simplifies the mounting and gives easy access for a Laser Displacement Sensor. The standard baffle as specified in IEC 60268-5 is also a convenient method of loudspeaker mounting.
Transducer should be measured under conditions such that the mechanical system including any acoustical load can be represented as a second- or fourth-order system. To measure the parameters of a driver (woofer, tweeter, micro-speaker, exciter, shaker, headphone …) at highest precision it is recommended to operate the driver in free air. Measuring a woofer in free air also requires less electrical input power, and produces less noise, than measuring the same driver in a closed system. The LSI WOOFER BOX makes it possible to measure the driver parameters of a fourth-order system such as a vented loudspeaker system and an exciter coupled to a panel.
A special stand proved to be useful to clamp woofers in a vertical position and to measure the displacement of the diaphragm by a Laser displacement meter is also available as dedicated accessory by KLIPPEL. Because there is no additional microphone needed, the acoustic environment in greater distance has a minor influence on the loudspeaker parameters so the measurement can also be performed in a normal working room or in a power test room.
Excitation Signal#
The Distortion Analyzer needs an excitation signal with sufficient amplitude and spectral properties to identify the transducer completely. A single sinusoidal signal with constant frequency and amplitude would allow identifying a system with two free parameters only. Clearly a multi-tone signal at high frequencies or a flute concert without any bass content would not generate high excursions of the voice coil producing nonlinear distortion components, which are the basis for detecting the transducer’s nonlinearities. Most of ordinary audio signals such as full orchestra music or pop music give persistent excitation but require a signal source (CD-player). However, an artificial noise signal used for simulating program material as specified in IEC 60268-1 is preferable and more convenient for transducer measurements. This signal can easily be generated in a DSP with desired properties in respect of spectral properties and reasonable amplitude distribution and enables the system identification to find the optimal parameters in a short time. The amplitude distribution of this noise is displayed as a probability density function (pdf) histogram.
Modes of Operation#
The measurement procedure is organized in initial identification, and long-term monitoring and additional modes of operation.
- Step 1 - Time Delay Check
Determines Time Delay of Amplifier
- Step 2 - Amplifier Mode
Amplifier check without transducer excitation
- Step 3 - Linear Mode
Measurement of the linear parameters in the small signal domain
- Step 4 - Enlargement Mode
Identification of the allowed working range (xprot, \(P_{\text{max}}\))
- Step 5 - Nonlinear Mode
Identification of the nonlinear parameters
- Step 6 - Thermal Mode
Identification of the thermal parameters
- Step 7 - Final Mode
Long-term measurement of all parameters
- Pause
System identification is interrupted by user
- Exception Mode
Malfunction explained by error message
The current mode is displayed at the hardware unit and at result window state.
Time Delay (Step 1)#
Determines the time delay of the amplifier. Maximum time delay the software can handle is 12.1 ms for the LSI Woofer and 6.2 ms for the LSI Tweeter version.
Amplifier Mode (Step 2)#
Before driving the loudspeaker with the excitation signal the additional equipment (power amplifier, cables, clamps) are checked in respect of
connectivity
gain of the amplifier
polarity (180 degree phase shift) of the signal
nonlinear distortion produced by the amplifier
linear transfer function (phase and amplitude response)
If the amplifier check is not successful the Distortion Analyzer goes automatically into the Exception Mode where the measurement is aborted and a malfunction message is issued.
Linear Mode (Step 3)#
After performing the \(R_{\text{e}}\) measurement, the loudspeaker is supplied with a small amplitude excitation signal. Since the variations of the nonlinear parameters and the heating of the voice coil can be neglected, the identified parameters correspond with the results of a traditional small-signal measurement. The voice coil resistance related to the ambient temperature \(T_{\text{V}} = T_{\text{A}}\) measured in this step is used as a reference to estimate the increase of voice coil temperature \(\triangle T_{\text{V}} = T_{\text{V}} - T_{\text{A}}\) in the following measurements.
Enlargement Mode (Step 4)#
After convergence of the linear parameter estimation the thermal and nonlinear parameters are estimated in the large signal domain by increasing slowly the amplitude of the excitation signal until one of the protection criteria reaches the predefined limit values and the maximal range of safe operation is detected. In the Enlargement Mode we use the highest learning speed possible.
Nonlinear Mode (Step 5)#
After finding the optimal range of operation the convergence of the nonlinear parameters at high amplitudes requires some time (5 min) because the occurrence of displacement peaks is relatively rare (compare the pdf (x) result window).
Thermal Mode (Step 6)#
After identifying the nonlinear parameters the thermal parameters are measured by attenuating the speaker’s input power according to the following scheme and monitoring the voice coil temperature \(\triangle T_{\text{V}}\):
Heating up the driver up to the permissible voice coil temperature (50-100 % of \(\triangle T_{\text{lim}}\) defined in the property page Protection) by using a high-pass filtered noise signal with low displacement
Cooling down the voice coil
Heating up the driver up to the permissible voice coil temperature (50-100 % of \(\triangle T_{\text{lim}}\) defined in the property page Protection) by using a full-band noise signal with high displacement
Cooling down the voice coil
Heating up the driver up to permissible voice coil temperature (50-100 % of \(\triangle T_{\text{lim}}\) defined in the property page Protection) by using a filtered noise signal with high power density at high frequencies
Cooling down the voice coil
Heating up the driver up to the permissible voice coil temperature (50-100 % of \(\triangle T_{\text{lim}}\) defined in the property page Protection) by using a filtered noise signal with high power density at high frequencies
The increase of the instantaneous temperature \(\triangle T_{\text{V}}\) of the voice coil is calculated from the increase of the voice coil resistance \(R_{\text{E}}(T_{\text{V}})\) and is stored together with the electric input power \(P\) in the database of the Processing Unit. The thermal parameters are calculated after the end of the thermal mode.
Final Mode (Step 7)#
After finishing the thermal mode the initial identification of the transducer is completed and the long-term measurement is activated. In this mode the learning speed of the update algorithm is reduced to minimize the influence of measurement noise on the estimated parameters. The instantaneous states and parameters are stored in the database at a reduced sample rate to monitor long-term variations of the transducer parameters and to measure the thermal resistance \(R_{\text{TM}}\) and capacitance \(C_{\text{TM}}\) of the magnet structure.
There are two additional modes of operation where the measurement is interrupted and the transducer is disconnected from the power amplifier:
Pause#
The measurement procedure can be paused at any time by clicking the  Pause button in
dB-Lab, or by selecting STOP at the Processing Unit. The measurement continues at the same step
after releasing the
Pause button in dB-Lab, or choosing CONTINUE on the hardware unit.
Pause button in
dB-Lab, or by selecting STOP at the Processing Unit. The measurement continues at the same step
after releasing the
Pause button in dB-Lab, or choosing CONTINUE on the hardware unit.
If a measurement is running, pressing the red key on the processing unit will disconnect the speaker and set the program into the pause mode. This ability is intended for a fast interruption of the measurement in an emergency case to protect the speaker.
Exception Mode#
The measurement of the large signal parameter is aborted if a malfunction is detected. In any case the state of the controller is frozen and the Distortion Analyzer automatically disconnects the loudspeaker from the amplifier output. An error message is displayed on the user interface both on the computer and on the Distortion Analyzer.
The Analyzer Unit checks all the other adaptive parameters and indicates a malfunction of the system identification (Exception Mode) if the values are beyond a physically meaningful range and disconnects the transducer from the Power Amplifier.
How the Protection works#
The Enlargement mode is a very critical mode because the limits of the working range have to be identified safely. An overload situation can be detected by monitoring the thermal, mechanical and electrical state quantities and the variation of the nonlinear parameters. Electrodynamic transducers may be destroyed by thermal and mechanical overload situation initiated by the electric signal at the terminals.
Thermal Load#
The heating of the loudspeaker is a relatively slow process that can be easily checked by monitoring the increase of the voice coil temperature \(\triangle T_{\text{V}}(t)\). If the voice coil temperature exceeds an allowed limit value the amplitude of the excitation signal has to be reduced to prevent from damaging the assembly. It should be noted that \(\triangle T_{\text{V}}(t)\) describes mean temperature of the voice coil averaged over all windings. Usually windings close to the pole piece and pole plate have a lower temperature than windings outside the gap. These differences in local temperature might become substantial in transducers with a long voice coil overhang.
Mechanical Load#
The voice coil displacement \(x(t)\) is a quantity which can describe the load put on the mechanical system. If the displacement exceeds an allowed peak value \(x_{\text{max}}\) the diaphragm, parts of mechanical suspension (spider, surround) or even the voice coil former may be endangered to permanent destruction. Thus the maximal displacement \(x_{\text{max}}\) is a very important parameter in the specification of the transducer related to the maximal acoustic output at low frequencies.
However, the displacement \(x\) is not as convenient as a protection variable if the maximal displacement \(x_{\text{max}}\) has not yet been specified for the particular driver. Therefore, a quantity is required which directly describes the geometrical changes of the suspension that indicate an overload situation. The nonlinear characteristic of the compliance reflects this information and the minimal compliance ratio \(C_{\text{min}}\) summarizes this in a convenient one-value parameter. Following usual transducer design the mechanical capability is limited by the spider or at least by the surround. Such transducers can handle a variation of \(C_{\text{min}}\) down to 20% without any damage. The measured \(C_{\text{min}}\) also reflects other limiting mechanisms such when the voice coil former hits the back plate. However, hard limiting occurs at distinct amplitude without any warning and cannot be anticipated from \(C_{\text{min}}\) at lower amplitudes.
The maximal variation of the force factor \(Bl_{\text{min}}\) is another useful criterion to detect the maximal displacement \(x_{\text{max}}\) of the transducer. This parameter reflects the ratio of the voice coil height to the thickness of the pole plates in the motor structure. Maximal force factor variation \(Bl_{\text{min}} < 50%\) produce substantial distortion components in the output signal spreading over the whole transfer band of the transducer and show the end of the useable working range.
Note
The working range of tweeters, headphones, micro-speakers and other transducers without spider is usually not limited by a progressive \(C_{\text{ms}}\)-nonlinearity. Here the input power \(P_{\text{lim}}\) should be used to operate the transducer in the permissible working range and avoid a destruction of the coil due to hard limiting.
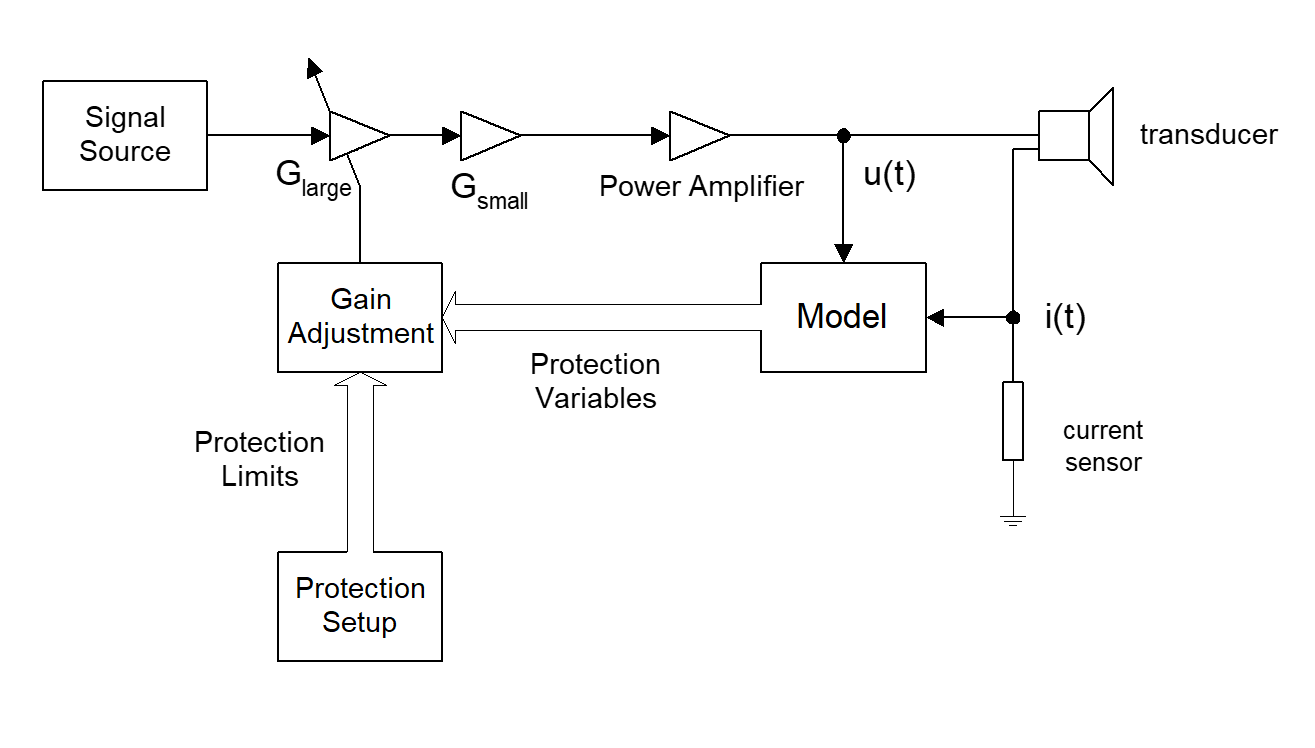
Gain Control#
The Distortion Analyzer uses this information in a protection system. The internally generated noise signal is fed via the gain control unit and the power amplifier to the transducer. The gain control unit contains two means for attenuating the amplitude of the excitation signal.
Small-Signal Amplitude#
The first attenuator \(G_{\text{small}}\) is constant during the measurement but can be modified within –20 dB \(< G_{\text{small}} < 0 dB\) by the user to select the optimal signal amplitude used in the small-signal measurement where even an unidentified transducer can be operated safely. The same setting can be used for the measurement of similar transducers unless there are significant differences in the power handling capacity.
The measurement of micro-speakers and headphones requires a low amplifier gain (< 10 dB between input and output) and a small signal gain of –20 dB.
Note
If the signal amplitude in the Linear Mode is too large you have to decrease the value of \(G_{\text{small}}\). Otherwise if the measurement aborts because \(G_{\text{large}}\) is above 26 dB you have to increase \(G_{\text{small}}\). Modification of \(G_{\text{small}}\) requires a restart of the measurement. Thus stop the measurement let the speaker cool down and restart the measurement with modified \(G_{\text{small}}\).
Large-Signal Amplitude#
The second gain \(G_{\text{large}}\) determines the maximal amplitude during the large signal measurement. During the small signal measurement \(G_{\text{large}}\) is set to the lowest value 0 dB. If the automatic gain adjustment is activated the gain \(G_{\text{large}}\) will be slowly increased in the following large signal measurement until the maximal range of operation is found. If \(G_{\text{large}}\) exceeds the upper limit of 26 dB an error message is generated and the system identification goes into the Exception Mode. The system controlling \(G_{\text{large}}\) in the Distortion Analyzer gets the protection variables \(\triangle T_{\text{V}}\), \(Bl_{\text{min}}\) , \(C_{\text{min}}\) , \(P\) and corresponding limit values defined in the protection setup as input. The protection variables can be easily identified from current monitoring and dispense with an additional sensor system.
Protection Limits#
For each protection variable a parameter describing the allowed limit value is specified on the property page protection:
The maximal value of \(G_{\text{large}}\) admissible for the particular transducer is found if at least one of the protection variables equals the limit parameter.
Default Protection Parameters#
The first three limit values \(\triangle T_{\text{lim}}\) , \(bl_{\text{lim}}\) and \(C_{\text{lim}}\) can be considered as general setup parameters. Using these limit values in a conservative way \(\triangle T_{\text{lim}} = 60 K\), \(b_{\text{lim}} = 50 \%\) and \(C_{\text{lim}} = 50 \%\) where the protection of the driver is the main concern these setup parameters are good for a wide range of transducers. To test a speaker at the thermal limits some technical details about the voice coil, the glue used and the material of the former are required. The maximal electric input power \(P_{\text{lim}}\) can be used as a more restrictive protection parameter, which is independent on the identification of the thermal and nonlinear mechanisms. The default value of \(P_{\text{lim}}\) is 50 W measured as real input power.
Aggressive Measurements#
If you intend to measure up to the allowed limits of the protection values it is recommended to manually increase the protection parameters while the operation is running. If you change the protection parameters, the measurement will go back to enlargement mode and adjust the working range to the new settings provided.
By doing this you will notice any additional problem such as rubbing of the voice coil, hitting of the voice coil former at the back plate and may change the protection parameters in time.
Controlling via PC#
Property Pages#
Select the LSI operation in the project window, and click the View properties button  . The
Property Pages contain the setup parameter, control the result display, and allow user interaction
with the identification process running in the Analyzer Unit. Certain parameters can be adjusted
even when the measurement is already running.
. The
Property Pages contain the setup parameter, control the result display, and allow user interaction
with the identification process running in the Analyzer Unit. Certain parameters can be adjusted
even when the measurement is already running.
Here a short summery on the Property Pages:
- INFO
The INFO page allows the user to change the name of the measurement and to add a comment to the measurement. For details, see the dB-Lab Manual.
- DRIVER
The DRIVER page contains special transducer parameters, which have to be provided by the user. For details, see the dB-Lab Manual.
- GENERATOR
The GENERATOR page gives access to setup parameters of the noise generator.
- PROTECTION
The PROTECTION page gives access to the parameters used for controlling the amplitude of the excitation signal.
- CONDITIONS
The Condition page allows to specify the mode when the measurement will be finished.
- IMPORT
The IMPORT Page allows the user to import known small signal parameters (\(Bl(0)\), \(M_{\text{MS}}\), \(R_{\text{e}}\)) from other measurements (LPM).
- SERIES
The nonlinear characteristics of force factor \(Bl(x)\), voice coil inductance \(L_{\text{E}}(x)\), compliance \(C_{\text{MS}}(x)\) and stiffness \(K_{\text{MS}}(x)\) can also be described by a power series expansion. The user can set the fitting range and order of series expansion Further, the user can adjust the thresholds for the displacement limits.
DRIVER Page#
The DRIVER page contains special transducer parameters, which could be provided by the user, but they are not necessary for the LSI operation.
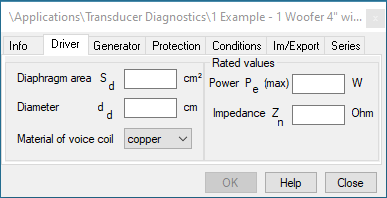
- Diaphragm area
- \(S_{\text{d}}\) in cm2
The diaphragm area is the effective projected surface area of the driver diaphragm. Inserting a \(S_{\text{d}}\) value will automatically calculate and overwrite the corresponding diameter for a circular diaphragm.
- Diameter
- \(d_{\text{d}}\) in cm
Alternatively insert the diameter of a circular diaphragm. The diaphragm area \(S_{\text{d}}\) will be calculated or existing \(S_{\text{d}}\) value overwritten. (For non-circular diaphragms use the direct \(S_{\text{d}}\) import.)
- Material of voice coil
- (Copper, aluminum)
The kind of material used for the voice coil has to be specified if known. This information is used to identify the increase of voice coil temperature from the variations of the voice coil resistance.
- Power
- \(P_{\text{e}}(\text{max})\) in W
The maximal electrical input power rated by the manufacturer. (Informative value with no influence on the measurement.)
- Impedance
- \(Z_{\text{n}}\) in Ohm
The electrical impedance rated by the manufacturer. (Used to calculate \(Z_{\text{n}}\) derived result parameters.)
GENERATOR Page#
The GENERATOR page gives access to setup parameters of the noise generator.
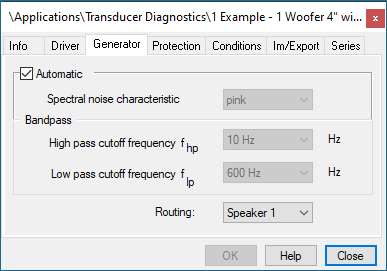
- Automatic
The band-pass filter will be adjusted to the particular driver automatically. In the Linear Mode the cut-off frequency of the high-pass \(f_{\text{hp}} = 0.5 \cdot f_{s}\) and the cut-off frequency of the low-pass \(f_{\text{lp}} = 10 \cdot f_{s}\) will be adjusted according to the resonance frequency \(f_{\text{s}}\).
- Spectral Characteristic
- pink, white
Random noise with a pink or white spectral characteristic may be generated which may be supplied to bandpass filtering and amplitude compression.
- Cut-off frequency of high-pass
- \(f_{\text{hp}}\) in HzRange: 10 – 150
A high pass of second order will be applied to the white or pink noise signal.
- Cut-off frequency of low-pass
- \(f_{\text{lp}}\) in HzRange: 200 – 1500
A lowpass of second order will be applied to the white or pink noise signal.
- Routing
- Speaker 1 or Speaker 2
In the standard hardware configuration, the Distortion Analyzer DA2 provides a sensitive current sensor at the terminal Speaker 2 (limited to 5 Amps peak) and a high current sensor (25 Amps) at the Speaker 1 terminal. Normally, LSI should run on Speaker 1 to avoid damage to the hardware. Use Speaker 2 only for low current measurements where results on Speaker 1 are unsatisfactory.
Note
Please check your delivery materials for the actual configuration of your hardware.
PROTECTION Page#
The PROTECTION page gives access to the parameters used for controlling the amplitude of the excitation signal.
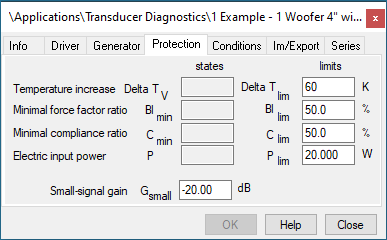
The left column shows the current state during the measurement, in the right column you can modify the protection parameters. To find the working range, LSI increases drive voltage until the states hit the limits.
Warning
Wrong settings can damage your driver. See Setting Protection Parameters below.
- \(\triangle T_{\text{V}}\)
- \(\triangle T_{\text{V}}\) in Kelvin
Instantaneous increase of voice coil temperature
- \(\triangle T_{\text{lim}}\)
- \(\triangle T_{\text{lim}}\) in KelvinRange: \(0 < \triangle T_{\text{V}} < 300\)
Allowed increase of voice coil temperature \(\triangle T_{\text{V}}\) as defined by the user in the protection property page (also used as a target value for thermal identification)
- \(Bl_{\text{min}}\)
- \(Bl_{\text{min}}\) in %
Ratio of minimal value of the force factor in the working range and value at the rest position
- \(Bl_{\text{lim}}\)
- \(Bl_{\text{lim}}\) in %Range: \(25 \% < Bl_{\text{lim}} < 100 \%\)
Allowed minimal value of the force factor variation ratio \(Bl_{\text{min}}\) as defined by the user in the protection property page
- \(C_{\text{min}}\)
- \(C_{\text{min}}\) in %
Ratio of minimal value of the compliance in the working range and value at the rest position
- \(C_{\text{lim}}\)
- \(C_{\text{lim}}\) in %Range: \(20 \% < C_{\text{lim}} < 100 \%\)
Allowed minimal value of the mechanical compliance ratio \(C_{\text{min}}\) as defined by the user in the protection property page
- \(P\)
- \(P\) in W
Real electrical input power
- \(P_{\text{lim}}\)
- \(P_{\text{lim}}\) in WRange: \(0 < P_{\text{min}} < 1000 W\)
Allowed maximal value of electric input power \(P\) as defined by the user in the protection property page
- \(G_{\text{small}}\)
- \(G_{\text{small}}\) in dBRange: \(–20 dB < G_{\text{small}} < 0 dB\)
The amplifier gain \(G_{\text{small}}\) at the bottom of the protection page is constant during the measurement but can be modified by the user to select the optimal signal amplitude used in the Linear Mode 2 where even an unidentified transducer can be operated safely. \(G_{\text{small}}\) compensates for the gain of power amplifier mainly. The same setting can be used for the measurement of similar transducers unless there are significant differences in the power handling capacity. After modifying this parameter the measurement is restarted automatically and begins with the Amplifier Mode 1.
Setting Protection Parameters#
Choosing the correct settings is crucial to protect your driver, and lets you define how “aggressive” the measurement is. Here are some tips from our experience which settings are relevant – but always remember that your driver may be different. Be especially careful for tweeter and telecommunication drivers!
The protection system will not detect all causes of failure, like tearing wires or the voice coil hitting the back plate. Always keep an eye on unknown driver types and your expensive prototypes.
Temperature#
Remember that \(\triangle T_{\text{lim}}\) specifies a temperature increase relative to the beginning of the measurement. Let thermally sensitive drivers cool down before you repeat a measurement.
Also, the temperature is an average over the voice coil length. Portions of the coil may be much hotter.
\(\triangle T_{\text{lim}}\) should be used to protect the DUT from overheating but not as regulare protection parameter limiting the stimulus increase at the Nonlinear Mode. During the Thermal Mode it will be used as target temperature.
Mechanical Protection#
\(B_{\text{lim}}\) and \(C_{\text{lim}}\)
These are often the limiting factors for subwoofers and midrange drivers, and they are adaptive to the driver size over wide range, from subwoofers to midrange drivers. Thus, the default settings work very well for these drivers. For large subwoofers, you can often decrease these parameters.
However, they often don’t provide protection for tweeter and mid-range drivers.
Electric input Power \(P\)
For tweeter measurements, it is best to start with a very low power, and increase it during the measurement, as described below.
Changing Protection parameters during measurement#
When you measure a type of driver for the first time, we recommend starting with strong protection parameters (low Power and \(\triangle T\), high \(B_{\text{lim}}\) , \(C_{\text{lim}}\)). Monitor the driver for clicking and other unusual noise and unstable behavior.
On the PROTECTION page you can see which parameter is limiting, and if more excitation is suitable. When you change the limiting protection parameter(s), the measurement will go back into the enlargement mode and adjust the excitation level to the new limits. You can repeat this until you have found the excitation level you are confident with.
CONDITIONS Page#
The CONDITION page allows modifying the conditions under which the transducer is measured.
 Property page to specify the measurement conditions
Property page to specify the measurement conditions
- Duration of Measurement
- Range: Select between: Infinite, Pause After, Finish After
There are three ways how to end the measurement. Selecting Infinite the measurement runs for ever in the Final Mode. Selecting Pause After you may continue with the measurement by releasing the Pause button. Selecting Finish After the measurement is finished after the selected mode.
- Finish task after
- Range: Select between: Not activated, Linear Mode, Nonlinear Mode, Thermal Mode, Enlargement Mode
The measurement procedure will be paused or finish the measurement after processing the mode specified by the user. After entering the pause mode the user can finish the measurement and save the current results or complete the measurement by resetting the pause bottom.
- Duration of ‘nonlinear Mode’
- Duration of ‘nonlinear Mode’ in minRange: typ. 5 - 10 min
The user can specify the duration of the nonlinear mode to ensure an optimal convergence of the parameters. Loudspeaker with high voice coil overhang requires a longer measurement time than drivers with an equal-length configuration.
- Enclosure
- Range: Select between: free air, sealed, vented
In the version LSI BOX you may select between driver operated in free air, in a sealed or vented enclosure.
- Air volume
- \(V_{\text{b}}\) in literRange: \(0.001 < V_{\text{b}} < 10000\)
In the version LSI BOX you have to specify the air volume of the box if sealed or vented enclosure is selected.
IM/EXPORT Page#
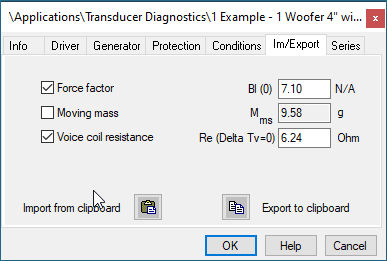
- \(Bl(x=0)\)
- \(B_{l}(x=0)\) in N/ARange: Clear (deactivated), \(0 < Bl(x=0) < 100 N/A\)
Force factor at the rest position of the voice coil
- \(M_{\text{MS}}\)
- \(M_{\text{MS}}\) in gRange: Clear (deactivated), \(0 < M_{\text{MS}} < 1000\)
Moving mass of driver diaphragm assembly including voice-coil and air load
- \(R_{\text{e}}(\triangle T_{\text{V}} = 0)\)
- \(R_{\text{e}}(\triangle T_{\text{V}} = 0)\) in OhmRange: Clear (deactivated), \(0 < R_{\text{e}} < 100\)
Electrical DC-resistance of the cold voice coil
- Import from Clipboard
You may import from clipboard \(Bl(x=0)\), \(M_{\text{MS}}\) and \(R_{\text{e}}(\triangle T_{\text{V}} = 0)\) used as import parameters and the all LSI setup parameters. Note, if you import setup parameter all results of previous LSI operation will be deleted. Press Cancel in the menu displayed to save measured data in the LSI operation and to copy import parameter only.
- Export to Clipboard
Press this button to copy all setup parameters, the large signal parameters and Auralization Data to the clipboard. You may view the results within the clipboard by using the editor provided by dB-Lab.
If a Laser Displacement Sensor is not available or the signal-to-noise-ratio of the sensor output is poor, the mechanical quantities cannot be identified as absolute values but can only be presented as relative parameters. The IMPORT Page allows the user to import the force factor \(Bl(0)\) at the rest position and/or the mechanical mass of driver diaphragm assembly including voice-coil and air load \(M_{\text{MS}}\) via this property page to transform the relative parameter and states into absolute values based on physical units.
Please note that an entry on this page has a higher priority than the laser measurement. Thus, all entries have to be cleared to use the Displacement Sensor for identification of the mechanical system.
The imported \(R_{\text{e}}\) value will be drawn as solid line up to the end of the Linear Mode in the \(R_{\text{e}}(t)\), \(Q_{\text{es}}(t)\) result window. It allows to compare the LSI measured \(R_{\text{e}}\) with the imported \(R_{\text{e}}\).
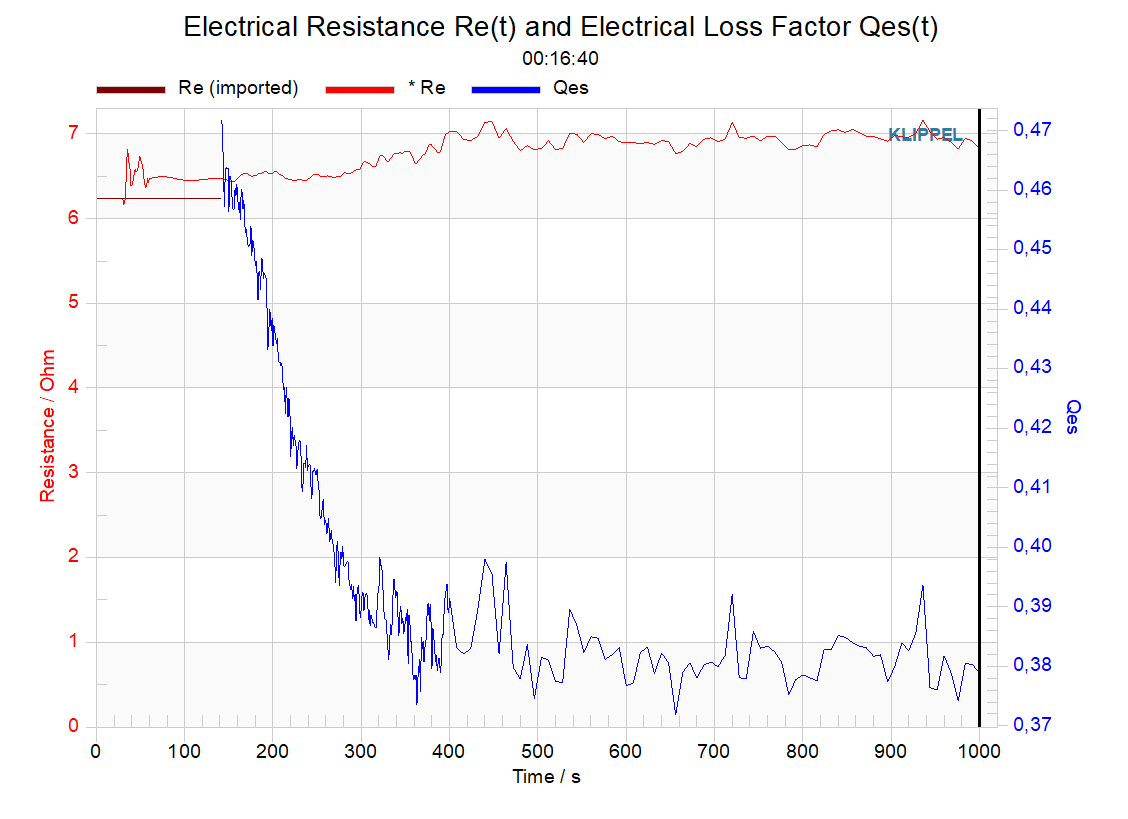
A higher LSI measured \(R_{\text{e}}\) is typically caused by a pre-warmed voice coil due to previous measurements or using a too high excitation during Linear Mode. If the \(R_{\text{e}}\) import is activated the \(\triangle T_{\text{V}}\) result curve represented by a dashed line in the TEMPERATURE, POWER result window shows the temperature increase during the measurement and will be used for the thermal protection of the measurement. A second \(\triangle T_{\text{V}}\)(referenced) result curve represents the total temperature increase from referenced ambient conditions. It must be guaranteed that the LPM measurement results used for the import into LSI have be done at referenced ambient conditions.
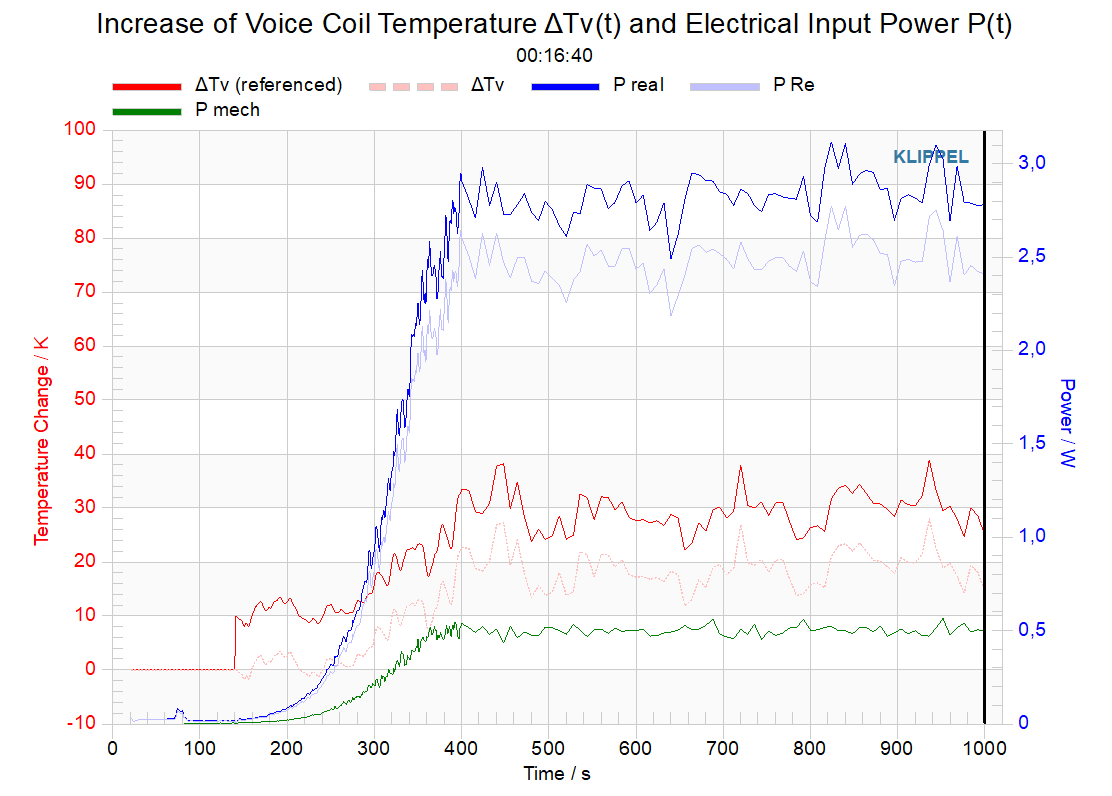
If the LSI measurement did not starts with voice coil at ambient temperature this will be displayed with a step of \(\triangle T_{\text{V}}\)(referenced) at the beginning of the Enlargement mode.
All modules supporting LSI import and export functionality are documented in chapter Supported Modules for Im/Export.
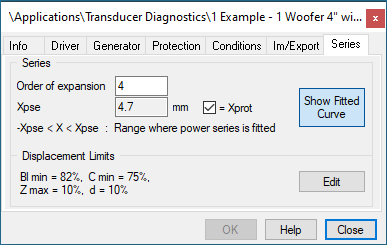
SERIES Page#
The nonlinear characteristics of force factor \(Bl(x)\), voice coil inductance \(L_{\text{E}}(x)\), compliance \(C_{\text{MS}}(x)\) and stiffness \(K_{\text{MS}}(s)\) can also be described by a power series expansion. The order of expansion usually determines where the series are truncated. A few numbers of coefficients represent the information and can be easily transformed into other applications (such simulations, controller for active compensation). However, the power series has only a limited range of convergence depending on the order of the expansion. Therefore, the fitted curve based on the power series expansion may be presented in the result windows and be compared with the measured parameter curves.
The property page for the series expansion comprises the following features:
- Order of Expansion
The order \(N\) of the series expansion may be modified in the range \(0 \leq N \leq 8\).
Note
Order of Expansion and \(x_{\text{pse}}\) affect the coefficients exported to the clipboard and displayed in the Nonlinear Parameters window. However, they have no effect on the \(Bl(x)\) etc. curves displayed, which use an internal representation. You can select Show fitted curve to show an additional curve using the fitting order and range selected here.
- \(x_{\text{pse}}\)
This parameter describes the range \(-x_{\text{pse}} \leq x \leq x_{\text{pse}}\) in which the power series is fitted to the original data. If the checkbox \(=x_{p}\) is activated, the reduced 99 % reliability range \(-(\text{min} (\vert x_{p+} \vert,\vert - x_{p-} \vert) ) \leq x \leq +(\text{min} (\vert x_{p+} \vert, \vert - x_{p-} \vert) )\) is used.
- Show Fitted Curve
If this button is activated the fitted curve based on the current series expansion is displayed with the original curves in the result windows.
- Displacement
Displays the Parameter Thresholds used for calculating the various
- Displacement Limits
Displays the Parameter Thresholds used for calculating the various parameter-based displacement limits. If a conflict with the protection parameters exists, an additional warning is displayed. Click the Edit button to change the Thresholds. For more information, see below.
Displacement Limit Thresholds#
The Thresholds for the parameter*based displacement limits can be edited on the Series property page. The displacement limits are displayed in the Nonlinear Parameters result window.
For a discussion of the displacement limits and the thresholds, please see KLIPPEL Application Note AN 5: Displacement Limits (available from www.klippel.de/know-how/literature/application-notes) and scientific paper Assessment of Voice Coil Peak Displacement Xmax (available from https://www.klippel.de/know-how/literature/papers).
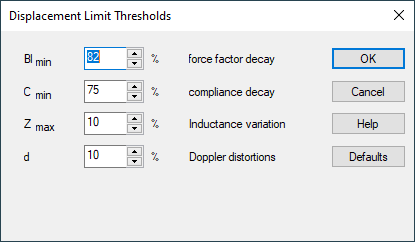
If an incorrect value is selected, or the value conflicts with the selected Protection Parameters (Property Page Protection), a warning is displayed. The shown default values are the standard conform values representing 10 % distortion generation from each nonlinarity.
- \(Bl_{\text{min}}\)
Force factor decay allowed at \(X_{Bl}\). The Protection Parameter \(Bl_{\text{lim}}\) should be up to ca 20 % lower than \(Bl_{\text{min}}\).
- \(C_{\text{min}}\)
Compliance decay allowed at \(X_{C}\). The Protection Parameter \(C_{\text{lim}}\) should be up to ca 20 % lower than \(Bl_{\text{min}}\).
- \(Z_{\text{max}}\)
Maximum variation of Inductance allowed at \(X_{L}\)
- \(d2\)
Maximum Doppler distortions allowed at \(X_{D}\)
- Defaults
Sets the Thresholds to the recommended values. The recommended thresholds cause ca. 10 % distortions due to the respective parameter.
Starting from Hardware Unit#
The measurement can be started and controlled at the Analyzer Unit or within the user interface at computer. Both control units will notify each other if the mode of operation has been changed.
The measurement of the Large Signal Identification can be performed by using a minimal hardware configuration comprising the Analyzer Unit, a power amplifier and the cables only. The small display and the keys allow the basic user interactions such as Start, Pause, modifying the Protection parameters, and show the most important state information.
Switch on the power supply on the right hand side of the front side.
Please wait while the current firmware revision, the serial number and the USB connection status are shown for 2 seconds
Press ENTER to select the stand alone mode.
Move the cursor arrow to LSI Speaker 1 by using the down and up key ↓ ↑
Press the ENTER key
You can later connect to the measurement from dB-Lab, to retrieve all results.
Connect the hardware unit with the measurement still running
Select an appropriate driver object in the dB-Lab project window, and click New Operation
 to create a new LSI operation
to create a new LSI operationClick the Run button
 to connect to the measurement
to connect to the measurementThe Select Device Dialog will indicate that you can attach to running measurement. Click OK to confirm.
Dis- and reconnect Processor Unit#
You may disconnect processor unit from the computer at any time without stopping the measurement:
click the Save/Finish button
 in dB-Lab
in dB-Labclick Continue Standalone in the Finish dialog.
The PC will save all data that has been acquired up to this point, and disconnects from the hardware unit. You can now disconnect the USB cable, and even close dB-Lab or shut down the computer. The measurement continues running. Later you can connect the PC again to retrieve all the results.
Note
The Clear Standalone Buffer checkbox affects how data is stored when disconnecting. If this checkbox remains unchecked (default), all data acquired up to this point will remain stored in the processing unit. Enabling that option is recommended for long-running measurements, as the standalone buffer of the device is limited. In both cases, dB-Lab will store the data acquired up to this point, and merge correctly when you later reconnect to that measurement.
You can later reconnect to the measurement, to retrieve the additional data acquired.
Reconnect the device with the measurement still running.
In the dB-Lab project window, select the LSI operation that you disconnected from
click the Run button
.The Device selection dialog will indicate that an LSI measurement is still running, and that you can reconnect to the running measurement. Click OK to confirm this.
Controlling via Processing Unit#
Starting the Measurement#
Usually you will start the LSI by PC, but alternatively you can control via Distortion Analyzer display without PC connected. Use the Cursor keys on the front panel to select a menu item and press ENTER to activate it.
After switching on the hardware unit, wait for about two seconds while the startup screen is displayed, then press ENTER to display the main menu.
You can navigate the cursor with the down/up keys ↓ / ↑. Make sure LSI is selected, and press the ENTER key.
The measurement starts with the Amplifier test.
You can now select STOP and press ENTER to pause the measurement, then choose SETUP to change the settings. Choose CONTINUE from the Measurement Paused menu to continue measurement.
Changing the Setup#
Select SETUP in the menu, and press ENTER. You can change both measurement and display settings.
Measurement Setup#
After activating the Measurement Setup the user has three options:
The PROTECTION menu allows the user to modify the protection limit values related with the automatic gain adjustment.
On the EXCITATION menu the user can change the upper cut-off frequency of the band-pass limited noise used as excitation signal.
Protection#
Select a protection limit parameter by using the up and down key and confirm with ENTER
Edit the parameter value by using the LEFT / RIGHT keys ◄ / ► to select the digit and by using the down/up keys ↓ / ↑ to change the digit. Confirm the correct value with ENTER.
Select the next protection limit parameter and edit it.
Finish the input of the protection limit parameters pressing the ESC key.
The protection menu gives access to the following parameters:
- \(\triangle T_{\text{lim}}\)
- \(\triangle T_{\text{lim}}\) in KelvinRange: \(0 < \triangle T_{\text{V}} < 300\)
Allowed increase of voice coil temperature \(\triangle\)
- \(Bl_{\text{lim}}\)
- \(Bl_{\text{lim}}\) in %Range: \(25 \% < Bl_{\text{min}} < 100 \%\)
Allowed minimal value of the force factor variation ratio \(Bl_{\text{min}}\)
- \(C_{\text{lim}}\)
- \(C_{\text{lim}}\) in %Range: \(20 \% < C_{\text{min}} < 100 \%\)
Allowed minimal value of the mechanical compliance ratio \(C_{\text{min}}\)
- \(P_{\text{lim}}\)
- \(P_{\text{lim}}\) in WRange: \(0 < P_{\text{lim}} < 1000 W\)
Allowed maximal value of electric input power \(P\)
- \(G_{\text{small}}\)
- \(G_{\text{small}}\) in dBRange: \(–20 dB < G_{\text{small}} < 0 dB\)
The amplifier gain \(G_{\text{small}}\) at the bottom of the protection page is constant during the measurement but can be modified by the user to select the optimal signal amplitude used in the Linear Mode 2 where even an unidentified transducer can be operated safely. \(G_{\text{small}}\) compensates for the gain of power amplifier mainly. The same setting can be used for the measurement of similar transducers unless there are significant differences in the power handling capacity. After modifying this parameter the measurement is restarted automatically and begins with the Amplifier Mode 1.
Excitation#
Select the cut-off frequency of the low-pass filter used for the noise by using the cursor down and up key ↓ ↑ and confirm with ENTER.
Display Setup#
Select between three options by using the down and up cursor ↓ ↑ and confirm with ENTER:
Single Variable: a selected variable will be displayed.
Alternately: all variables will be displayed periodically. This is the default setting. Please note that in the Amplifier Check mode always the RMS voltage is displayed for checking the amplifier output.
Display Pages: a set of selected variables will be displayed. Three groups are selectable. Return from these pages by pressing any key.
Display Single Variable#
Select a state variable by using the down and up cursor key ↓ ↑ and confirm with ENTER. The following state variables can be selected:
- \(\triangle T\)
- \(\triangle T\) in Kelvin
Increase voice coil temperature
- \(u_{\text{max}}\)
- \(u_{\text{max}}\) in V
Peak voltage
- \(i_{\text{peak}}\)
- \(i_{\text{peak}}\) in A
Peak current
- \(x_{\text{peak}}\)
- \(x_{\text{peak}}\) in mm
Peak displacement of the voice coil, Laser required
- \(x_{\text{DC}}\)
- \(x_{\text{DC}}\) in mm
DC offset of displacement, Laser required
- \(P\)
- \(P\) in W
Current value of real electrical input power
- \(C_{\text{min}}\)
- \(C_{\text{min}}\) in %
Current value of minimal compliance ratio
- \(Bl_{\text{min}}\)
- \(Bl_{\text{min}}\) in %
Current value of minimal force factor ratio
- \(d_{L}\)
- \(d_{L}\) in %
Part of distortion caused by inductance \(L\)
- \(d_{C}\)
- \(d_{C}\) in %
Part of distortion caused by compliance \(C\)
- \(d_{b}\)
- \(d_{b}\) in %
Part of distortion caused by force factor \(b\)
Please note a Laser Sensor is required for displaying the peak and DC-value of the displacement as absolute quantities.
Alternate update#
By choosing alternate update the displayed variable will change every 2 s periodically. All variables marked in the previous section with will be displayed. This is the default display setup.
If a measurement is running and using the single variable or alternate update display mode the main menu contains the following elements:
Select between three options by using the left and right cursor and confirm with ENTER:
STOP: This function interrupts the current measurement and displays the Pause page. This function can also be activated by using the red key at the front side (only when measurement is running!).
SETUP: This function gives access to the Measurement Setup where the protection limits, the excitation signals and the import parameters can be modified or to the Display Setup where the display mode may be modified.
PAGE: The chosen Display Page will be displayed. The default Display Page is Protection States and Limits.
Display Pages#
After selecting one of the display pages, all variables of the selected page are updated on the display automatically. If the display page is activated the current mode of operation will not be shown. When the user interrupts the measurement or a malfunction occurs the display page will disappear and the Exception Page or the content Pause page will be coming up. The user can resume the display page mode by pressing any key (except the red one, this will pause the current measurement). If the measurement is running the last chosen display page will be shown, if the entry PAGE will be selected.
Select between three display modes by using the down and up cursor ↓ ↑ and confirm with ENTER:
Protection States and allowed protection limits
Distortion Analysis on the instantaneous distortion components
Auxiliary States (displacement, voltage current)
- \(\triangle T_{\text{V}}\)
- \(\triangle T_{\text{V}}\) in Kelvin
Instantaneous increase of voice coil temperature
- \(\triangle T_{\text{lim}}\)
- \(\triangle T_{\text{lim}}\) in V
Allowed increase of voice coil temperature \(\triangle T_{\text{V}}\) as defined by the user in the protection property page (in brackets)
- \(Bl_{\text{min}}\)
- \(Bl_{\text{min}}\) in %
Ratio of minimal value of the force factor in the working range and value at the rest position
- \(Bl_{\text{lim}}\)
- \(Bl_{\text{lim}}\) in %
Allowed minimal value of the force factor variation ratio \(Bl_{\text{min}}\) as defined by the user in the protection property page (in brackets)
- \(C_{\text{min}}\)
- \(C_{\text{min}}\) in %
Ratio of minimal value of the compliance in the working range and value at the rest position
- \(C_{\text{lim}}\)
- \(C_{\text{lim}}\) in %
Allowed minimal value of the mechanical compliance ratio \(C_{\text{min}}\) as defined by the user in the protection property page (in brackets)
- \(P\)
- \(P\) in W
Electric input power
- \(P_{\text{lim}}\)
- \(P_{\text{lim}}\) in W
Allowed maximal value of electric input power \(P\) as defined by the user in the protection property page (in brackets)
The page Distortion Analysis shows the contribution of each nonlinearity to the total distortion online while reproducing an audio-like signal. It should be noted that because these states are peak values measured within the last update period, it is not correct to sum the 3 parts up in order to obtain the total distortion.
- \(d_{b}\)
- \(d_{b}\) in %
Distortion factor representing contribution of nonlinear force factor (ratio of the peak values of the force factor distortion and peak value of the total signal)
- \(d_{L}\)
- \(d_{L}\) in %
Distortion factor representing contribution of nonlinear inductance (ratio of the peak values of the inductance distortion and peak value of the total signal)
- \(d_{C}\)
- \(d_{C}\) in %
Distortion factor representing contribution of nonlinear compliance (ratio of the peak values of the compliance distortion and peak value of the total signal)
The page Auxiliary States shows the peak value of the electrical and mechanical quantities.
- \(i_{\text{rms}}\)
- \(i_{\text{rms}}\) in A
RMS value of the electric input current
- \(u_{\text{rms}}\)
- \(u_{\text{rms}}\) in V
RMS value of the electric voltage at the transducer terminals
- \(x_{\text{peak}}\)
- \(x_{\text{peak}}\) in mm
Positive peak value of voice coil excursion, Laser required
- \(x_{\text{bottom}}\)
- \(x_{\text{bottom}}\) in mm
Negative peak value (bottom) of voice coil excursion, Laser required
- \(x_{\text{DC}}\)
Averaged DC-value of voice coil excursion, Laser required
Results#
The results of the measurement consist of state information and parameter information. The state information describes the physical quantities of the transducer and the signals related with the system identification in the last update interval. These data depend on the instantaneous properties of the excitation signal. The parameter information refers to the transducer and shows a minor dependence on the excitation signal. However, the parameter estimates are not constant but show some stochastic fluctuations due to the measurement noise and some systematic changes due to reversible and non-reversible mechanisms (heating, aging, creep).
Parameters#
In contrast to linear loudspeaker theory the large signal modeling considers that loudspeaker parameters depend on instantaneous loudspeaker state variables. Thus, important loudspeaker parameters such as \(Bl\)-factor, compliance \(C\) and inductance \(L\) are not assumed as constant but depend on the instantaneous displacement \(x\) of the voice coil. Other parameters such as mechanical damping might be also considered as variables but contribute less to the nonlinear behavior of loudspeakers at high amplitudes.
- \(-x_{prot} < x < x_{prot}\)
The maximum displacement range detected by the automatic gain adjustment (limited by the protection system). The current parameter estimates of the nonlinear elements are displayed as a function of the displacement in this range.
- \(-x_{\text{bottom}} < x < x_{\text{peak}}\)
During the measurement, a black line indicates the peak and bottom value \(-x_{bottom} < x < x_{peak}\) that occurred the last update interval.
- \(x_{p-} < x < x_{p+}\)
After finishing the measurement, the black line represents the range of confidence \(x_{p-} < x < x_{p+}\) of the nonlinear parameter measurement where the voice coil displacement occurred with a probability of 99 %.
- Relative parameters and displacement
If the mechanical parameters are represented as relative quantities (e.g. \(K_{\text{MS}}(x)/K_{\text{MS}}(0)\) , \(Bl(x)/Bl(0)\)) and the displacement is expressed as \(x/x_{prot}\) then the mechanical system has not been identified in absolute terms. Please use a laser or import the parameters \(Bl(0)\) and/or \(M_{\text{MS}}\) via the Im/Export property page.
- Orientation of the displacement
The user may change the sign of the displacement by changing the polarity of the SPEAKER cables (blue and red) connected to the driver’s terminals. We recommend using a negative displacement to represent a movement of the coil to the back plate. Please refer to the marks coil in and coil out for the current orientation of displacement.
- COIL IN/ COIL OUT
A laser sensor head used in LSI pointing on the diaphragm will display the marks coil in and coil out at the bottom of the diagram depending on the orientation of the speaker cables. The coil in mark should always represent a movement of the voice coil to the back plate.
Bl(x) Force factor#
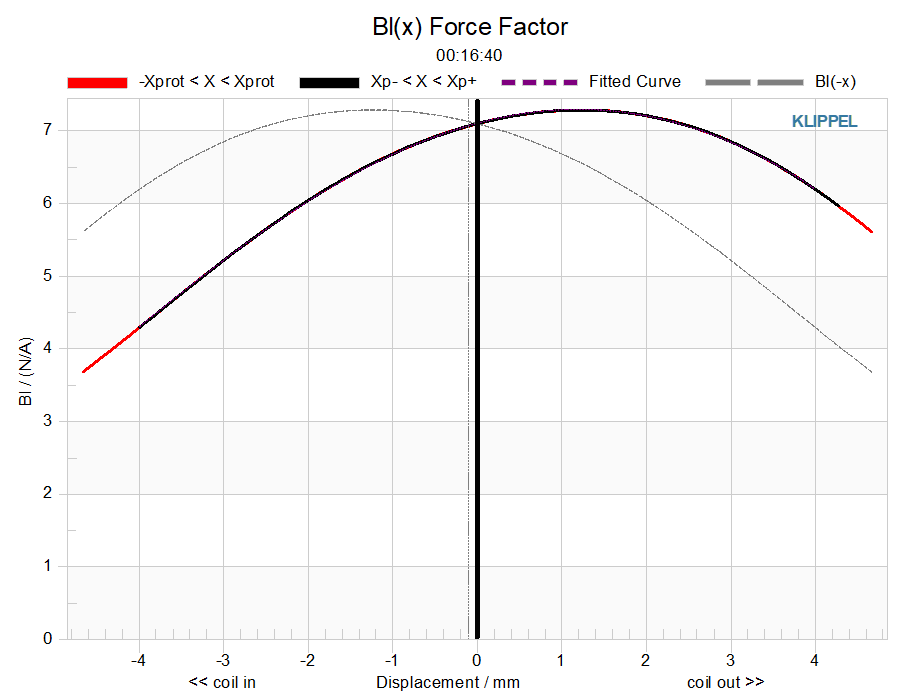
The electrodynamic coupling factor, also called Bl-product or force factor \(Bl(x)\) is defined by the integral of the magnetic flux density \(B\) over voice coil length \(l\). In traditional modeling this parameter is assumed as constant. The force factor \(Bl(0)\) at the rest position corresponds with the \(Bl\)-product used in linear modeling.
During the measurement, the black line indicates the current working range (peak and bottom displacement) in the last update interval. After the measurement, it indicates the reliability interval of 99 % voice coil displacement.
The dashed curve \(Bl(-x)\) indicates the force factor mirrored at the rest position. This quickly helps identifying asymmetries.
Vertical dotted line: The rest position may vary during the LSI measurement, e.g. the original rest position may be caused by the storage conditions before the measurement (vertical or horizontal). Mechanical stress on the suspension, heating and other visco-elastic effects may also change the rest position during and after the test.
The dotted line is the original rest position of the driver measured by the displacement sensor at the beginning of the measurement. The y-axis of the chart (x=0) is the instantaneous rest position (if the stimulus would be switched off).
The instantaneous rest position should be used for coil alignment. The original rest position may be helpful for comparison with FE analysis of the motor structure.
Note
The display of the rest position requires a displacement sensor (laser) and a reliable signal during measurement (displacement error \(E_{x}(t) < 5 \%\) ). Do not move the sensor during LSI measurement.
Cms(x) Compliance#
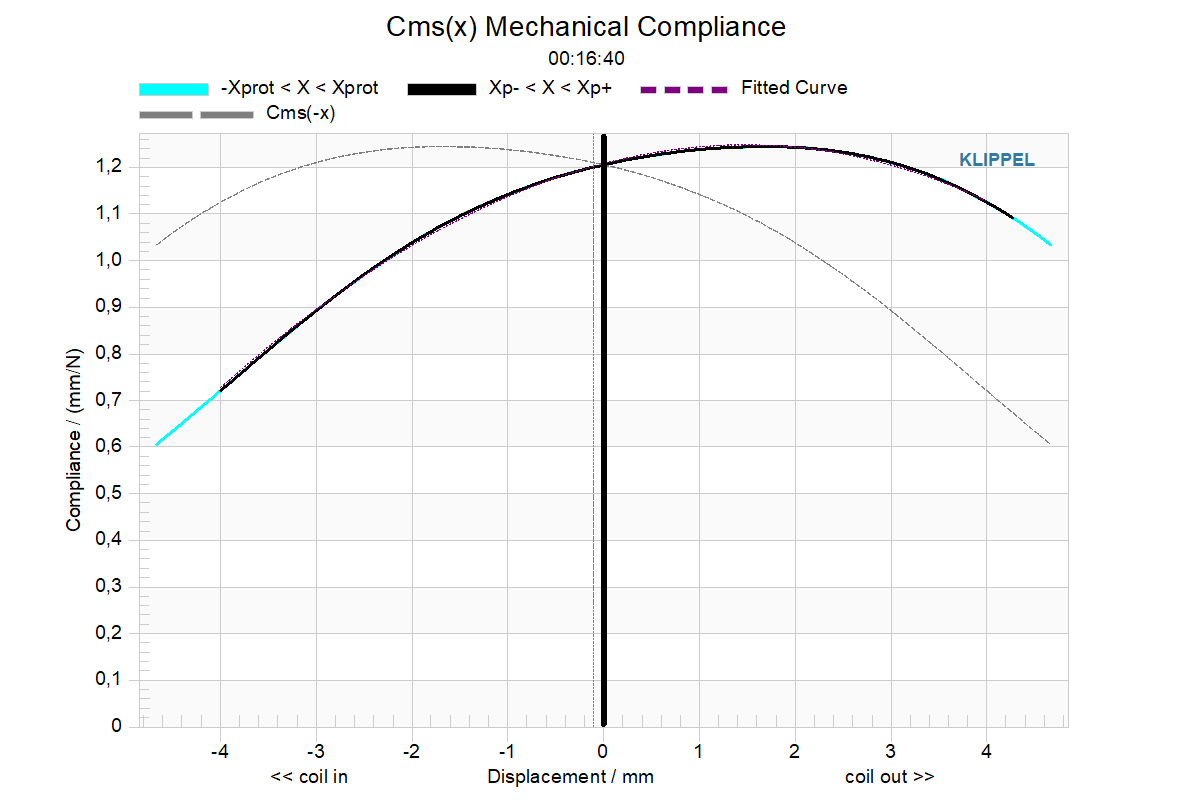
The compliance \(C_{\text{MS}}(x)\) describes the mechanical properties of the mechanical suspension. It is the inverse of stiffness \(K_{\text{MS}}(x,t)\).
For a description of the different curves, see Bl(x) Force factor.
- LSI Box
For LSI Box, the chart will also display the total compliance of the entire system \(K_{\text{MT}}(x)\) as dotted line.
For the driver compliance to be displayed, both \(S_{\text{D}}\) at property page Driver and the box volume \(V_{\text{b}}\) on property page Conditions needs to be set correctly. Otherwise, LSI box will only display the total stiffness and a warning:
Sd or Vb are invalid.
Note that you can change \(S_{\text{D}}\) and \(V_{\text{b}}\) after the measurement is complete. However, enclosure type must be set before the measurement.
Kms(x) Stiffness#
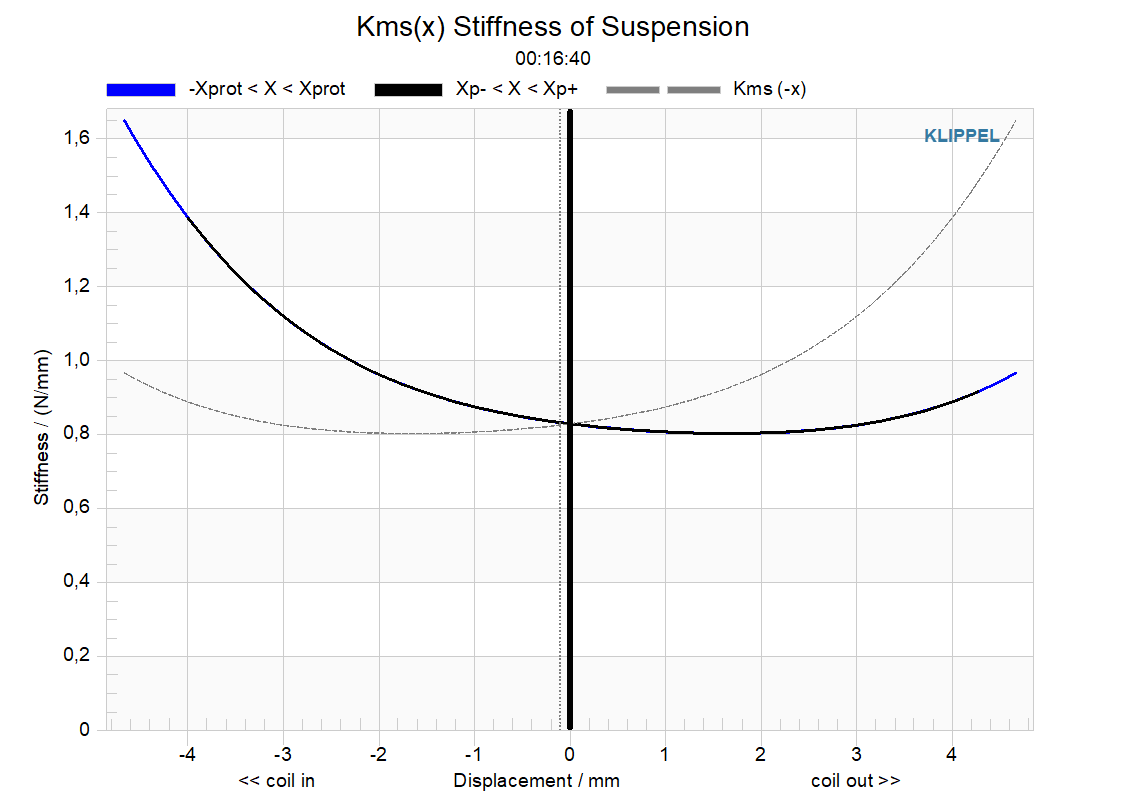
The stiffness \(K_{\text{MS}}(x)\) describes the mechanical properties of the mechanical suspension and is the inverse of the compliance \(C_{\text{MS}}(x)\).
For a description of the different curves, see Bl(x) Force factor.
- LSI Box
For LSI Box, the chart will also display the total stiffness of the entire system \(K_{\text{MT}}(x)\) as dotted line.
For the driver stiffness to be displayed, both \(S_{\text{D}}\) at property page Driver and the box volume \(V_{\text{b}}\) on property page Conditions needs to be set correctly. Otherwise, LSI box will only display the total stiffness and a warning:
Sd or Vb are invalid.
Note that you can change \(S_{\text{D}}\) and \(V_{\text{b}}\) after the measurement is complete. However, enclosure type must be set before the measurement.
Le(x) Inductance#
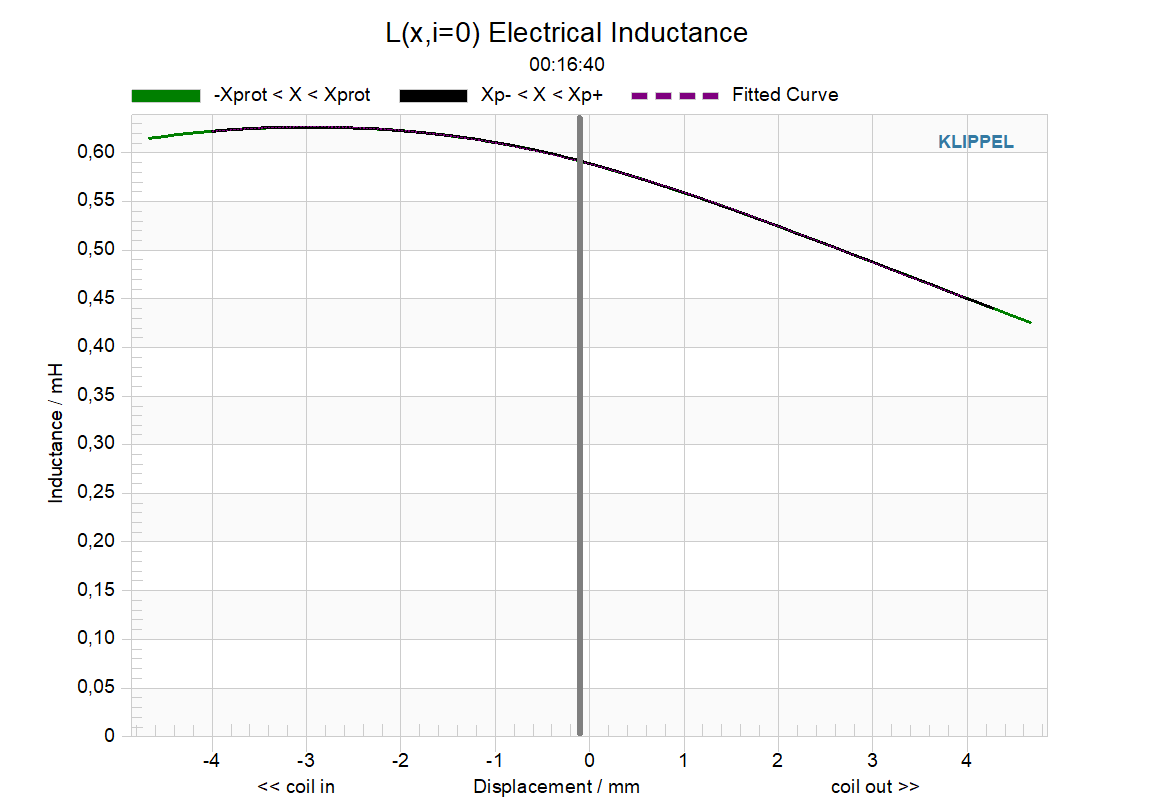
The electrical properties of the voice coil are described by the parameters \(R_{\text{e}}(T_{\text{V}})\) , \(L_{\text{e}}(x)\) , \(L_{2}(x)\) and \(R_{2}(x)\). The last three parameters are required to describe the effect of eddy currents in the conductive parts close to the voice coil.
Since these parameters are directly related with the magnetic field generated by the voice coil current \(i(t)\), it may be assumed that the nonlinear parameter \(L_{2}(x)\) has the same nonlinear characteristic as \(L_{\text{e}}(x)\) versus displacement \(x\).
The inductance \(L_{\text{e}}(x)\) of most drivers has a strong asymmetric characteristic. If the voice coil moves towards the back plate the inductance usually increases since the magnetic field generated by the current in the voice coil has a lower magnetic resistance due to the shorter air path. This property can be used for checking the polarity of the loudspeaker and to interpret the direction of the excursion in the diagrams of the nonlinear parameters. In our example the negative displacement \(x\) corresponds with an approach the back plate (voice coil in gap).
For a description of the different curves, see Bl(x) Force factor.
Le(i) Inductance#
(LSI Woofer and LSI Woofer Box only)
For woofers the variation of the inductance \(L_{\text{e}}\) versus voice coil current is measured. This kind of nonlinearity is closely related with variation of the permeability of the iron in the pole plates and piece. It contributes to the harmonic distortion measured at frequencies above resonance frequency \(f_{\text{s}}\).
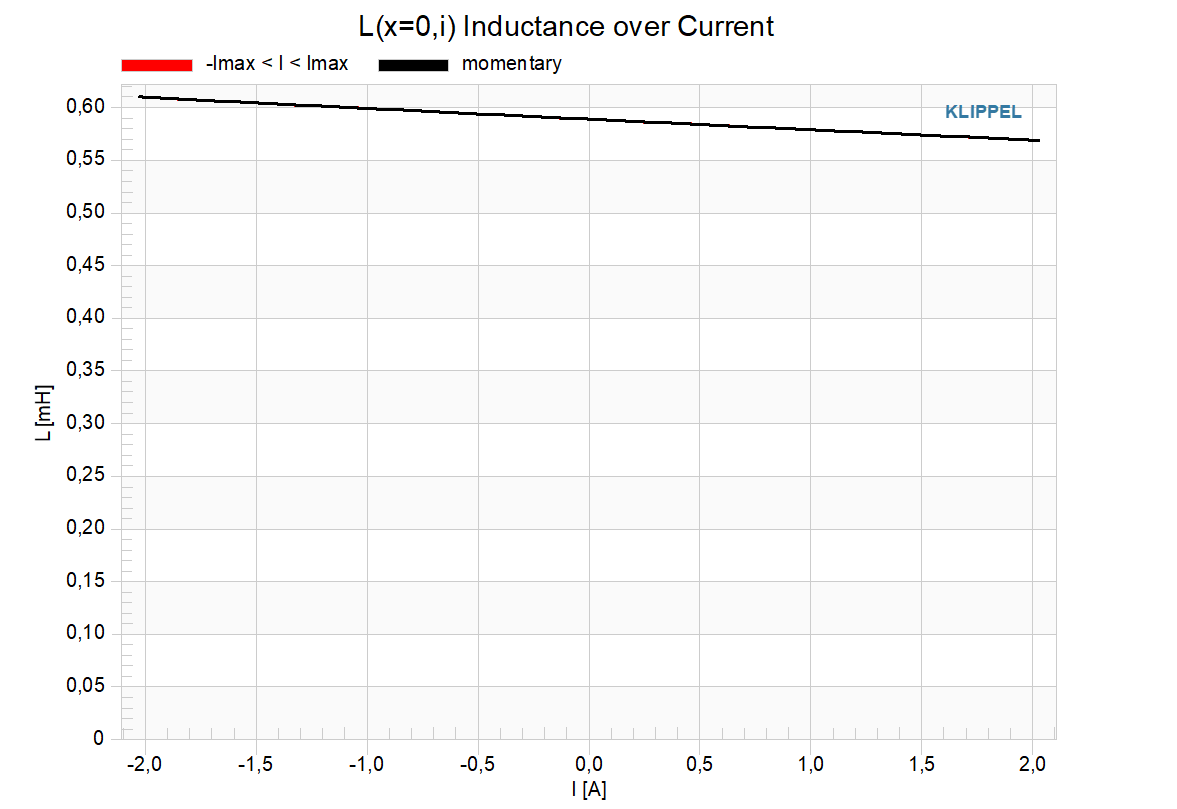
Rms(v) Mechanical Resistance#
(LSI Tweeter only)
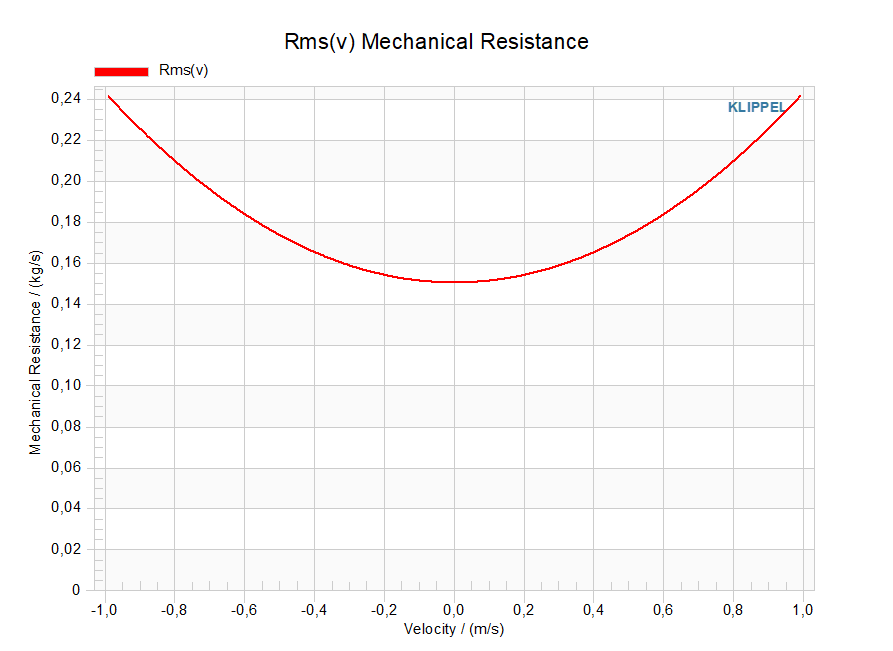
The dependency of the mechanical resistance \(R_{\text{MS}}\) on voice coil velocity \(v\) is a dominant nonlinearity in micro-speakers and other transducers which have a relatively high resonance frequency \(f_{\text{s}}\), a relatively small force factor \(Bl\) and a total quality factor \(Q_{\text{ts}}\) dominated by the mechanical losses. This nonlinearity can be neglected in woofers using a strong motor with a high value of the force factor \(Bl\), a small DC-resistance \(R_{\text{e}}\) and being operated by a voltage supply where the electrical damping dominates the mechanical damping.
The \(R_{\text{MS}}(v)\)-nonlinearity causes at resonance frequency a significant increase of the mechanical damping causing a nonlinear amplitude compression of the fundamental and generating significant harmonic and intermodulation distortion.
There are strong indications that the nonlinear variation of RMS-nonlinearity is not caused by the mechanical vibration of the diaphragm or other mechanical elements because measurements show the nonlinearity vanishes when the micro-speaker was operated in vacuum. For details, see W. Klippel, Modeling the Large Signal Behavior of Micro-speakers.
fs(x) Resonance Frequency#
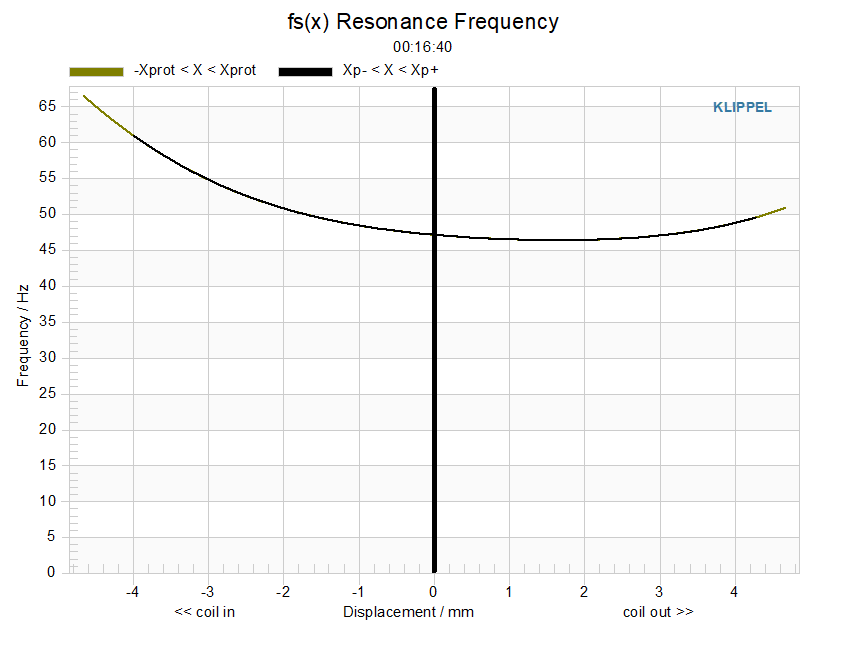
The instantaneous resonance frequency \(f_{\text{s}}(x)\) is displayed as a function of voice coil displacement \(x\) caused by the variations of the mechanical compliance defined by
Qmx(x) Mechanical Loss Factor#
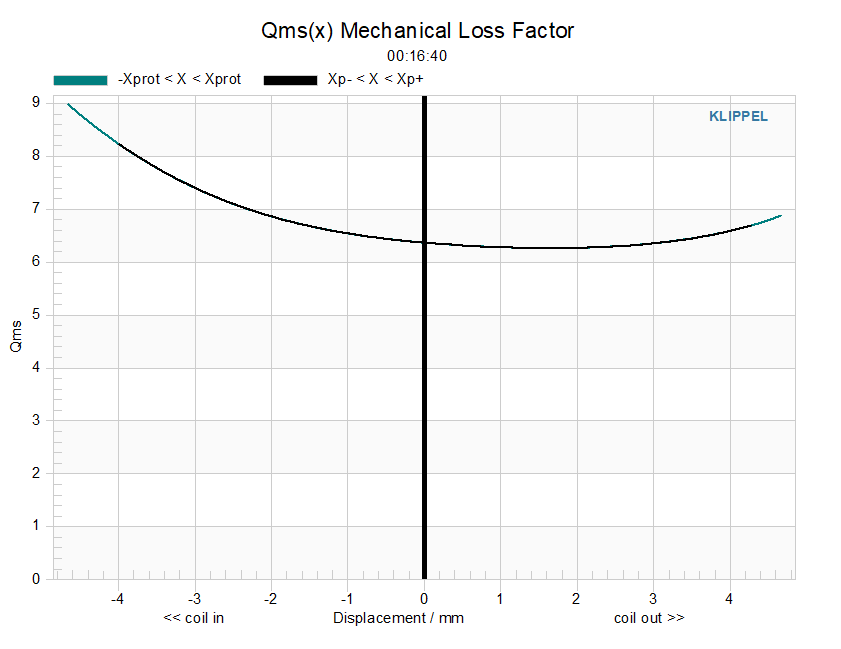
The loss factor \(Q_{\text{MX}}(x)\) of driver at \(f_{\text{s}}\) considering driver non-electrical resistances only is
The nonlinearity of \(Q_{\text{MX}}(x)\) is mainly caused by the variation of the instantaneous resonance \(f_{\text{s}}(x)\) with the displacement \(x\) The variation of the mechanical resistance \(R_{\text{M}}(x)\) and of the moving mass \(M_{\text{MS}}(x)\) may also contribute to this effect.
Qes(x) Electrical Loss Factor#
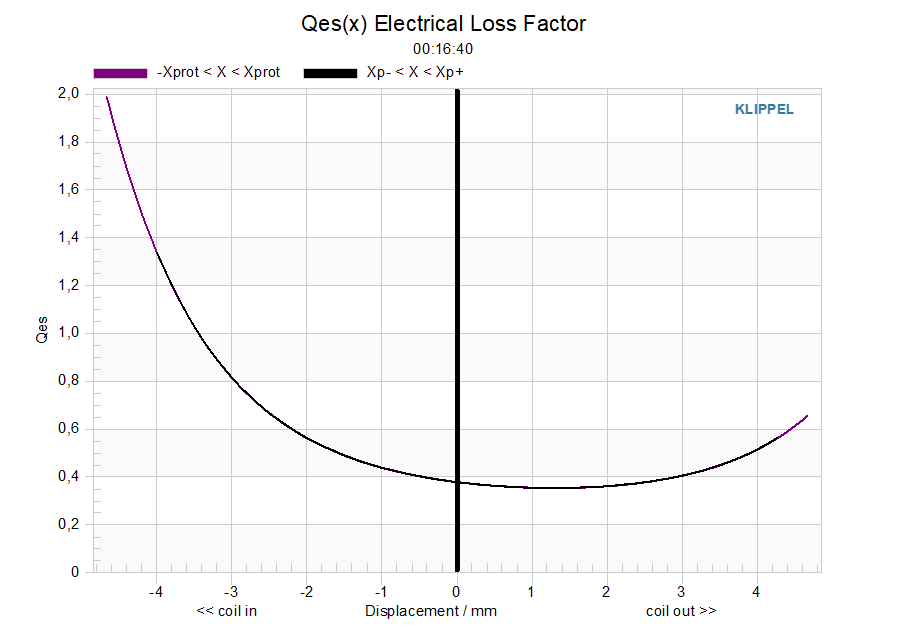
The electrical loss factor \(Q_{\text{es}}(T_{V},x)\)
becomes a nonlinear function when the force factor \(Bl(x)\) varies with displacement. If the voice coil moves out of the gap and the force factor decreases to 25 % of the value at the rest position the \(Q_{\text{es}}(x)\) will be increased by factor 16 and the electric damping almost disappears. In normal voltage driven speakers connected to amplifiers having a low output impedance \(Q_{\text{es}}(x)\) is dominant over the mechanical damping \(Q_{\text{MS}}(x)\) and determines the total damping \(Q_{\text{TS}}(x)\). Thus the variations of the electric damping generate substantial distortion components and affect the amplitude of the fundamental.
Qts(x) Total Loss Factor#
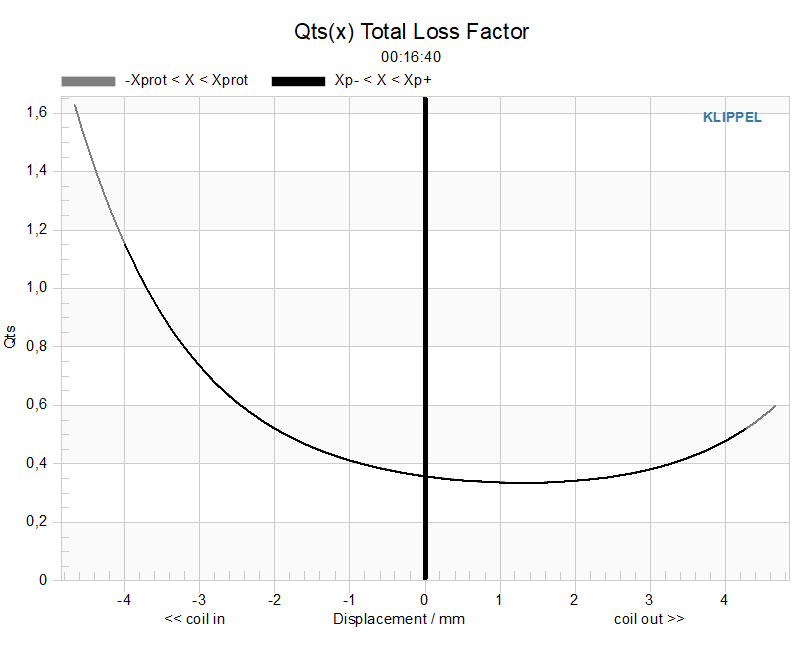
The total loss factor \(Q_{\text{ts}}(T_{V},x)\) defined as
summarizes the effect of mechanical and electrical damping. In a voltage driven speaker connected to a low impedance source the electrical loss factor \(Q_{\text{es}}(x)\) determines the total loss factor \(Q_{\text{ts}}(x)\) at small amplitudes but the mechanical loss factor might become dominant at higher amplitudes if the force factor \(Bl(x)\) varies substantially with the displacement.
Nonlinear Parameters#
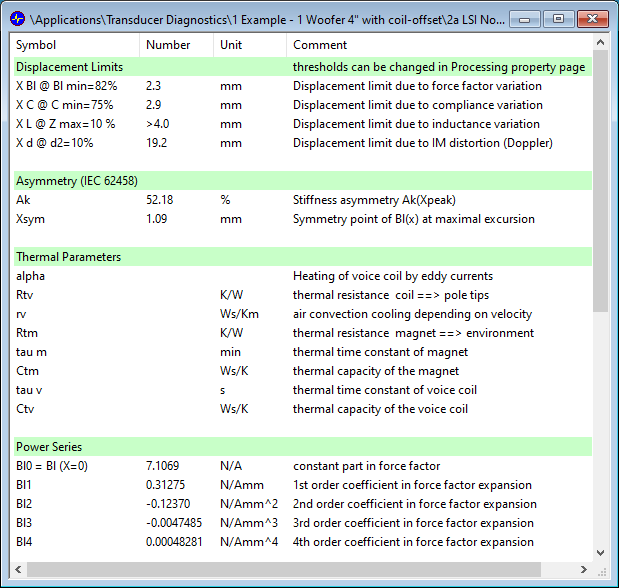
The parameter-based displacement limits \(X_{Bl}\) , \(X_{C}\) , \(X_{L}\) and \(X_{D}\) are displayed for the thresholds set in the Series Property Page.
Displacement limit from motor#
\(X_{Bl}\)
The maximal displacement \(X_{Bl}\) limited by excessive motor distortion may be obtained from the nonlinear force factor characteristic \(Bl(x)\). We define the minimal force factor ratio
which is the ratio of the minimal force factor \(Bl(x)\) in the working range \(\pm X_{Bl}\) referred to the \(Bl\)-value at the rest position \(x = 0\). \(X_{Bl}\) is implicit in the equation and can be found in the nonlinear \(Bl(x)\)-characteristic after defining the threshold \(Bl_{\text{min}}\).
Displacement limit from suspension#
\(X_{C}\)
The maximal displacement related to the critical mechanical strain of suspension may be obtained from the nonlinear stiffness characteristic \(K_{\text{ms}}(x)\) or from its counterpart, the compliance characteristic \(C_{\text{ms}}(x)\). Introducing a minimal compliance ratio
which is the ratio of the minimal value of the compliance within the working range \(\pm X_{C}\) and the value at the rest position \(x = 0\).
\(X_{C}\) is implicit in the equation and can be found in the nonlinear \(C_{\text{ms}}(x)\)-characteristic by using a pre-defined threshold \(C_{\text{min}}\).
Displacement limit from inductance#
\(X_{L}\)
The complicated frequency characteristic is caused by the para-inductance of the coil and additional losses due to eddy currents. This can be modeled by a lumped parameter model comprising the electrical DC resistance \(R_{\text{e}}\), the voice coil resistance \(L_{\text{e}}(x)\) and the additional elements \(L_{2}(x)\) and \(R_{2}(x)\) in parallel. For the nonlinear elements we assume the same shape of the curve giving
The variation of the impedance versus displacement \(x\) is directly related with the magnitude of the intermodulation distortion generated in the current and in the radiated sound pressure output. Thus, the displacement limit \(X_{L}\) is defined implicitly by
which is the ratio of the maximal variation of the electrical impedance at frequency \(f_{2}\) within the working range \(-X_{L} < x < X_{L}\) and the impedance at the rest position \(x = 0\).
To keep the parameter-based method consistent with the performance-based method, the frequency \(f_{2} = 8.5 \cdot f_{\text{s}}\) is coupled to the resonance frequency \(f_{\text{s}}\) and the impedance can be approximated by
where \(s = 2 \pi f_{2} j\).
Displacement limit due to Doppler#
\(X_{D}\)
The peak displacement \(X_{D}\) considering the audibility of the Doppler effect can be calculated analytically using the simple equation
presented by Beers and Belar [33], using the peak displacement \(X_{\text{peak}}\) in mm, the second-order modulation distortion \(d_{2}\) in percent according to IEC 60268 and the frequency \(f_{2}\) of the modulated voice tone. To keep the definition of \(X_{D}\) consistent with the performance base method we set \(f_{2} = 8.5 \cdot f_{\text{s}}\) and use the distortion threshold \(d\) (\(d = 10 \%\)) giving a displacement limit due to Doppler
where \(X_{D}\) is in mm and \(f_{\text{s}}\) is in Hz.
Coefficients of the power series#
The nonlinear force factor
compliance of the driver suspension
stiffness of driver suspension
and inductance versus displacement
and inductance versus current
are expanded in a power series expansion where \(x\) is the voice coil displacement in mm, \(i\) is the voice coil current in A and the nonlinear coefficients are given by the result window Nonlinear Parameters.
Thermal Parameters#
Parameters at the Rest Position#
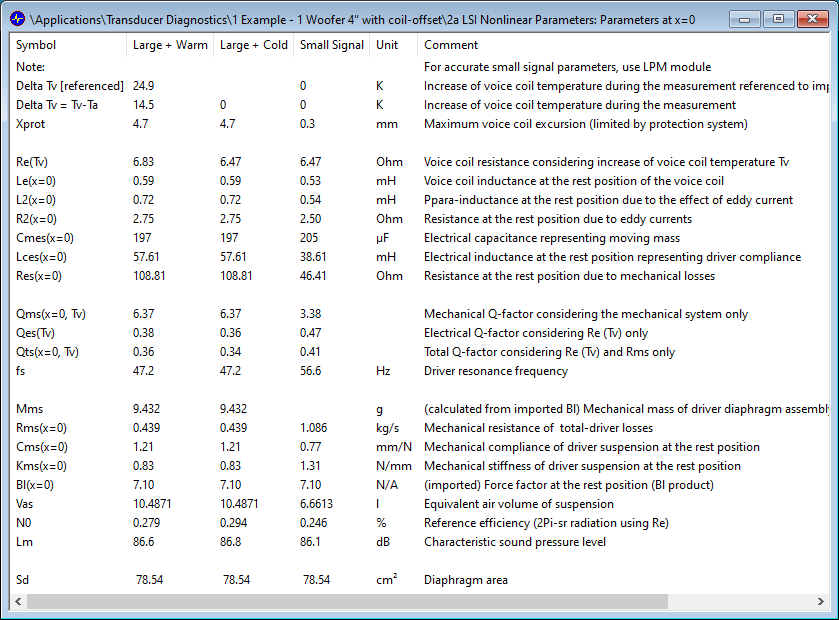
Note
for accurate small signal parameters, use the LPM module
The values of the nonlinear parameters at the rest position (\(x = 0\)) are of special interest for linear approximation of the driver behavior. The values of the parameters at the rest position (\(x = 0\)) can be used as input parameter for a linear modeling.
However, the time-variant parameters \(C_{\text{ms}}(x = 0,t)\) , \(K_{\text{ms}}(x = 0,t)\) and \(R_{\text{e}}(T_{V})\) differ usually from the corresponding small signal parameters due to heating, creep and aging.
Using the history information of the parameters sampled during measurement time, the result window State gives the parameter at the rest position for three different modes of operation. (see headline of table in result window)
LARGE+WARM (large signal domain + warm speaker)
the peak value of the displacement is high (\(x_{\text{peak}} \leq x_{prot}\)),
the variation of the parameters is not negligible (\(C_{\text{min}} \ll 100 \%\) and/or \(Bl_{\text{min}} \ll 100 \%\) and/or \(L_{\text{min}} \ll 100 \%\)),
the voice coil temperature is increased (\(\triangle T_{\text{V}} > 0\)) due to heating.
LARGE+COLD (large signal domain + cold speaker)
the peak value of the displacement is high (\(\vert x \vert < x_{prot}\)),
the variation of the parameters is not negligible (\(C_{\text{min}} \ll 100 \%\) and/or \(Bl_{\text{min}} \ll 100 \%\) and/or \(L_{\text{min}} \ll 100 \%\)),
the effect of heating is compensated while considering the cold voice coil resistance measured in the LINEAR MODE of the initial identification where (\(\triangle T_{\text{V}} = 0\)).
SMALL SIGNAL (small signal domain + cold speaker)
the amplitude of the excitation signal is sufficiently small,
the displacement is small in comparison to the allowed maximal displacement (\(\vert x \vert \ll x_{prot}\)),
the variations of the nonlinear parameters are negligible (\(C_{\text{min}} \approx 100 \%\), \(Bl_{\text{min}} \approx 100 \%\), \(L_{\text{min}} \approx 100 \%\)),
the increase of voice coil temperature is negligible (\(\triangle T_{\text{V}} \approx 0\)),
the effects of the nonlinear, thermal and time-varying mechanisms are negligible and the transducer behaves almost linear.
Equivalent Volume#
The volume of air having same acoustic compliance as driver suspension is
with the density of air \(\rho = 1.18 kg/m^3\), the velocity of sound in air \(c = 345 m/s\) and effective projected surface area of driver diaphragm \(S_{\text{D}}\).
Reference Efficiency#
For a loudspeaker driver mounted in an infinite baffle the efficiency of the electroacoustical conversion with radiation into the half-space is
Relationship to Linear Modeling#
The so called Linear Parameters are required as the input parameters for traditional linear modeling. All of the parameters are assumed to be constant and the dependence on the state quantities (displacement \(x\) and temperature \(T_{\text{V}}\)) is neglected and the value of the displacement varying parameters at the rest position (\(x = 0\)) is used. This approximation is valid in the small-signal domain only. At higher amplitudes there are systematic discrepancies between small-signal and large-signal parameters due to heating and the time variance of some transducer parameters.
The traditional loudspeaker design is based on a linear model comprising constant parameters only. This model is simple and explains the linear transfer behavior (e.g. amplitude and phase response) at low amplitudes. The linear model can be considered as an approximation of the expanded model valid in the small-signal domain. The parameters of both models are closely related with each other. However, to explain the differences we have to distinguish between Small signal parameters and Large-signal parameters at the rest position.
Small Signal Parameters#
Keeping the amplitude of the excitation and state signals sufficiently small the effects of the nonlinear, thermal and time-varying mechanisms are negligible and the transducer behaves almost linear. Using a linear model requires to measure the transducer parameters in the small signal domain where
the displacement is small in comparison to the allowed maximal displacement (\(\vert x \vert \ll x_{prot}\)),
the variations of the nonlinear parameters are negligible (\(C_{\text{min}} \approx 100 \%\), \(Bl_{\text{min}} \approx 100 \%\), \(L_{\text{min}} \approx 100 \%\)),
the increase of voice coil temperature is negligible (\(\triangle T_{\text{V}} \approx 0\)).
Under those conditions the varying parameters of the extended model correspond with the constant parameter used in traditional modeling:
Removed Results#
The following results were removed in dB-Lab Release 206:
Electrical capacitance \(C_{\text{mes}}(x)\)
Electrical inductance \(L_{\text{ces}}(x)\)
Electrical resistance \(R_{\text{es}}(x)\)
They are hard to interpret and have often caused confusion without tangible benefit.
State Variables#
The system identification used in the (Distortion Analyzer) provides not only the free parameters of the transducer model but also state variables depending on the excitation signal. There are three kinds of state variables
Transducer States
The electrical, mechanical and thermal quantities such as displacement \(x\), velocity \(v\), current \(I\), power \(P\), voice coil and magnet temperature are represented by digital variables in the DSP. These states are subjected to statistical investigations and their properties can be described by peak values, rms values, probability density functions (pdf) or other measures.
Signal Properties
The properties of the excitation signal are represented by statistical measures (peak and RMS value, probability density function pdf (u)…
Errors in the adaptive Modeling
The fitting of the model is described by error measures in percent.
State Window#
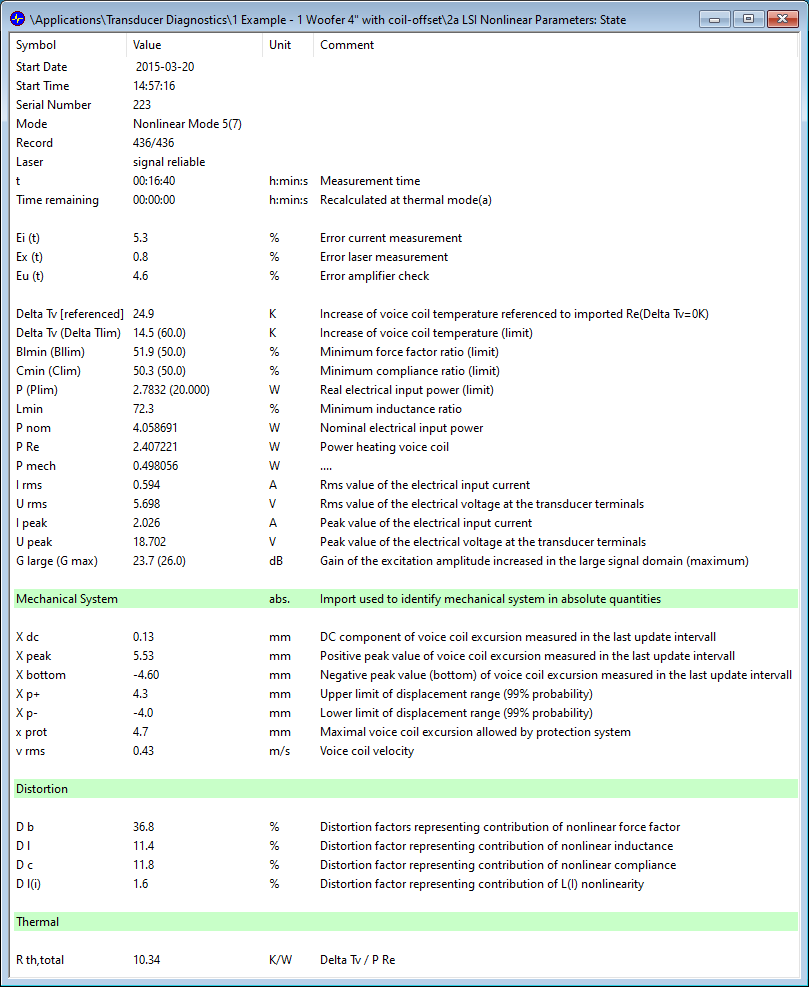
The state window gives a summary of the all relevant state variables at a selected time depending on the marker (black or pink vertical line) in the result window Temperature / Power. Each entry is described in greater detail in the respective windows.
Temporal Variations of States and Parameters#
The instantaneous state variables and parameters estimated by the system identification are permanently sampled and stored in the database of the Processing Unit. Connecting a personal computer to the Processing Unit the following parameters can be displayed versus measurement time:
Voltage and Current#
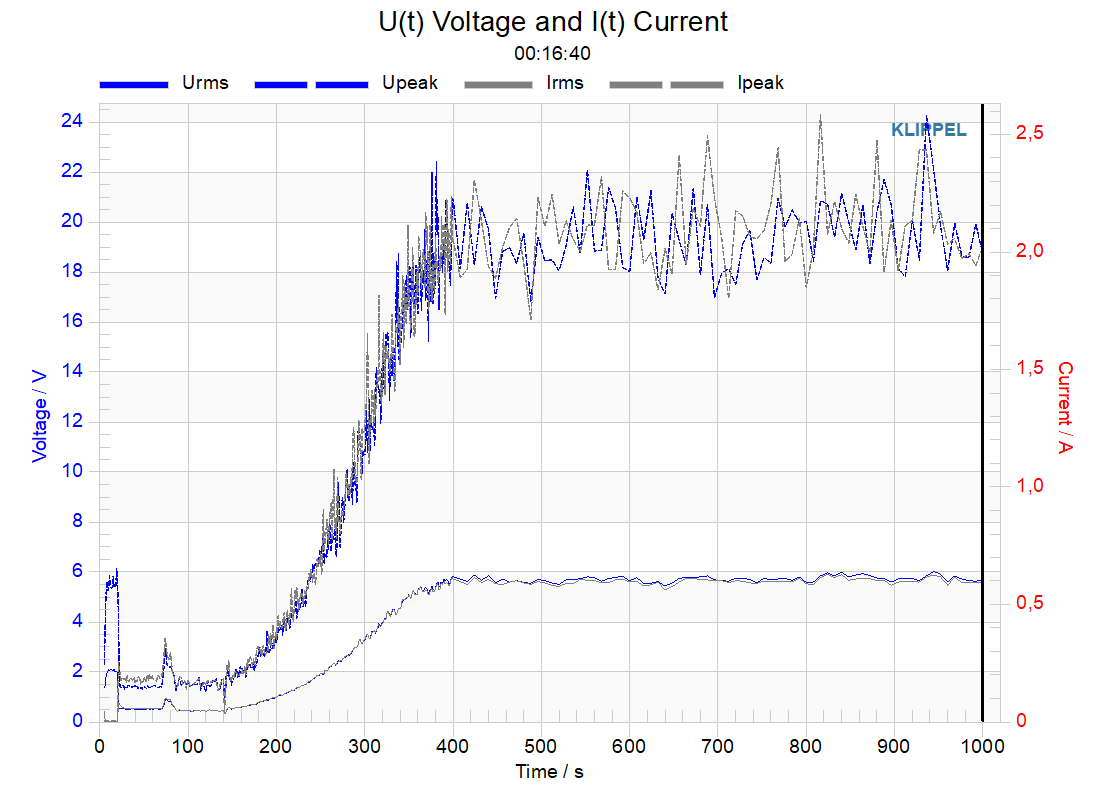
This result window characterizes the properties of the electric signals at the transducer terminals.
The time cursor can be dragged with the mouse or moved with ctrl-cursor to go back in measurement
PDF Voltage#
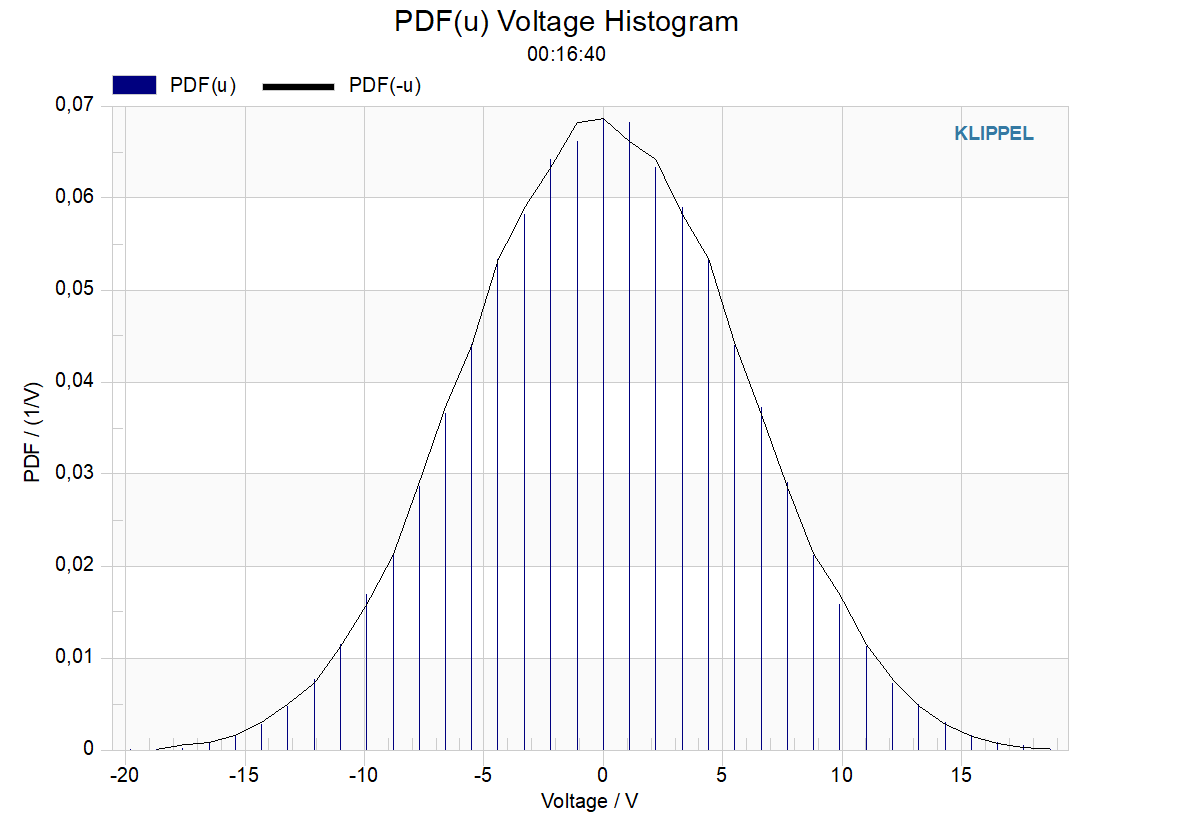
This result window shows the probability density function of the voltage \(pdf(u)\) measured in the Final Mode 7(7). This function reflects the properties of the excitation signal (noise) and of the power amplifier used. If the power amplifier is not limiting and does not generate a DC-component in the output signal the \(pdf(u)\) is almost perfectly symmetrical. The properties of the \(pdf(u)\) can be summarized by calculating the positive and negative peak values, the RMS-value and the crest-factor of the signal.
Temperature, Power#
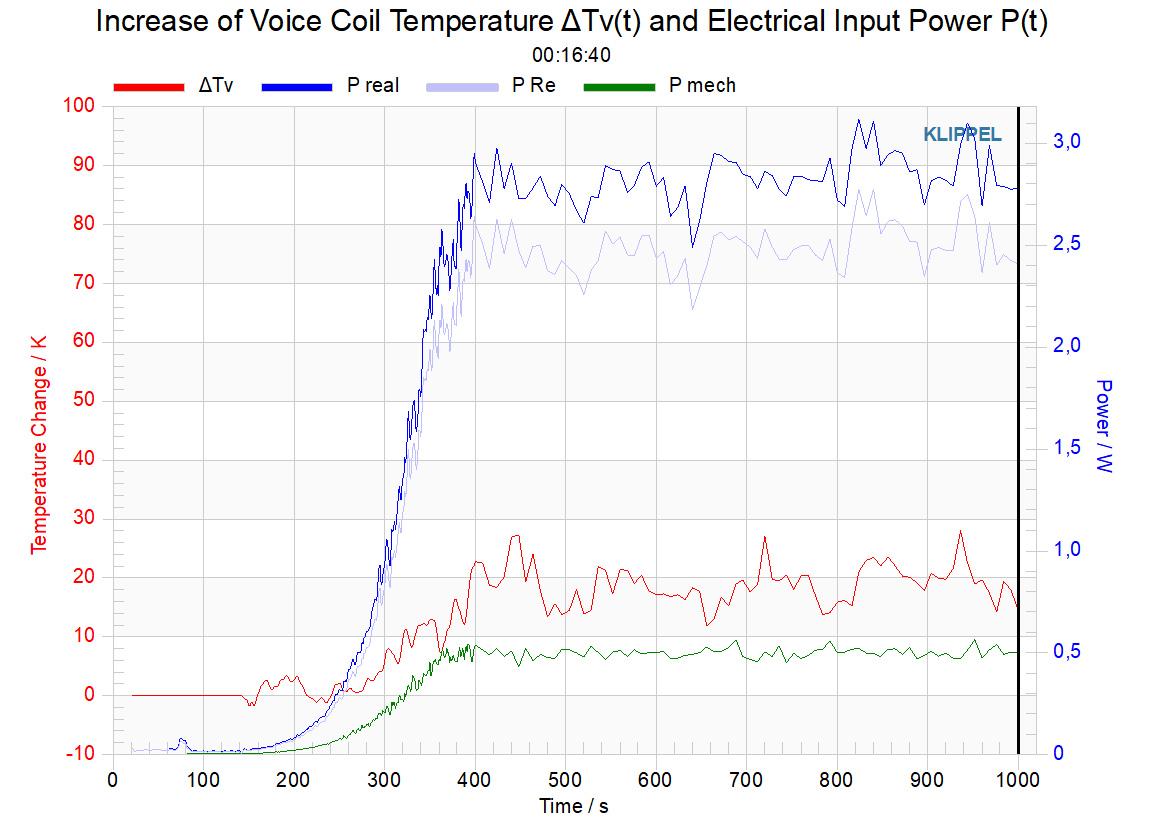
This result window shows the increase of the voice coil temperature \(\triangle T_{\text{V}}\) in comparison to the electric input power \(P(t)\) versus measurement time.
Note that by importing a \(R_{\text{e}}(T_{\text{V}} = 0 \text{ K})\) value the \(\triangle T_{\text{V}}\) curve is recalibrated. That means, the \(\triangle T_{\text{V}}\) curve is shifted in a way that the temperature values are assumed to use the imported \(R_{\text{e}}(T_{\text{V}} = 0 \text{ K})\) value. A second curve is displayed, which shows the values using the determined \(R_{\text{e}}(T_{\text{V}} = 0 \text{ K})\) value of the linear mode. Using this import, one can see if the voice coil heated up significant during the linear mode, and check the values of the temperature protection.
The different modes of operation can easily be identified in the time plot. The low values of both states at the beginning of the measurement correspond with Linear Mode 3(7) where the transducer is operated in the small-signal domain. The temperature of the voice coil at the end of this phase is used as reference temperature \(T_{\text{A}}\) that equals the ambient temperature almost. The increase of the input power indicates the Enlargement Mode 4(7) where the allowed range of safe operation is identified. Usually the voice coil temperature \(T_{\text{V}}\) increases with the input power. Both state signals are used as protection variables and are compared with the limit values \(P_{\text{lim}}\) and \(T_{\text{lim}}\) defined by the user. In the Thermal Mode 6(7) the excitation signal is attenuated for 120 s to measure the thermal parameters of the voice coil from the temperature response. In the Final Mode 7(7) the input power is almost constant but the voice coil temperature \(T_{\text{V}}\) may increase to higher values due to the heating of the magnet structure, which has a longer time constant.
\(P_{R_{\text{e}}}\) indicates the power that goes directly into the voice coil and heats up the driver. If the thermal model was identified completely.
The apparent power \(P_{\text{mech}}\) in Watt describes the power flowing in and out of the mechanical suspension. It is the product of the RMS values of the restoring force and the voice coil velocity, considering the \(K_{\text{ms}}(x)\) nonlinearity. \(P_{\text{mech}}\) can be derived from the electrical signals at the loudspeaker terminals and displacement with a mechanical calibration (using a laser sensor or a force factor \(Bl(x = 0)\) import). The apparent mechanical work calculated from the apparent power \(P_{\text{mech}}\) , accumulated over the life time of the suspension, and describes fatigue and ageing process of the suspension.
Note
The voice coil temperature measured by the electrical impedance is an averaged value. For coils with large overhang the partial temperature at the coil ends is usually much higher than in the middle part where the conduction to the pole tips is better. Power deducted due to convection cooling \(P_{\text{con}}\) was removed in release 202, since it cannot be displayed with reliable accuracy within the limitations of the LSI module. However, results can be calculated using the SIM2 Simulation module.
The time marker can be dragged with the mouse or moved with ctrl-cursor to go back in measurement history.
Distortion#
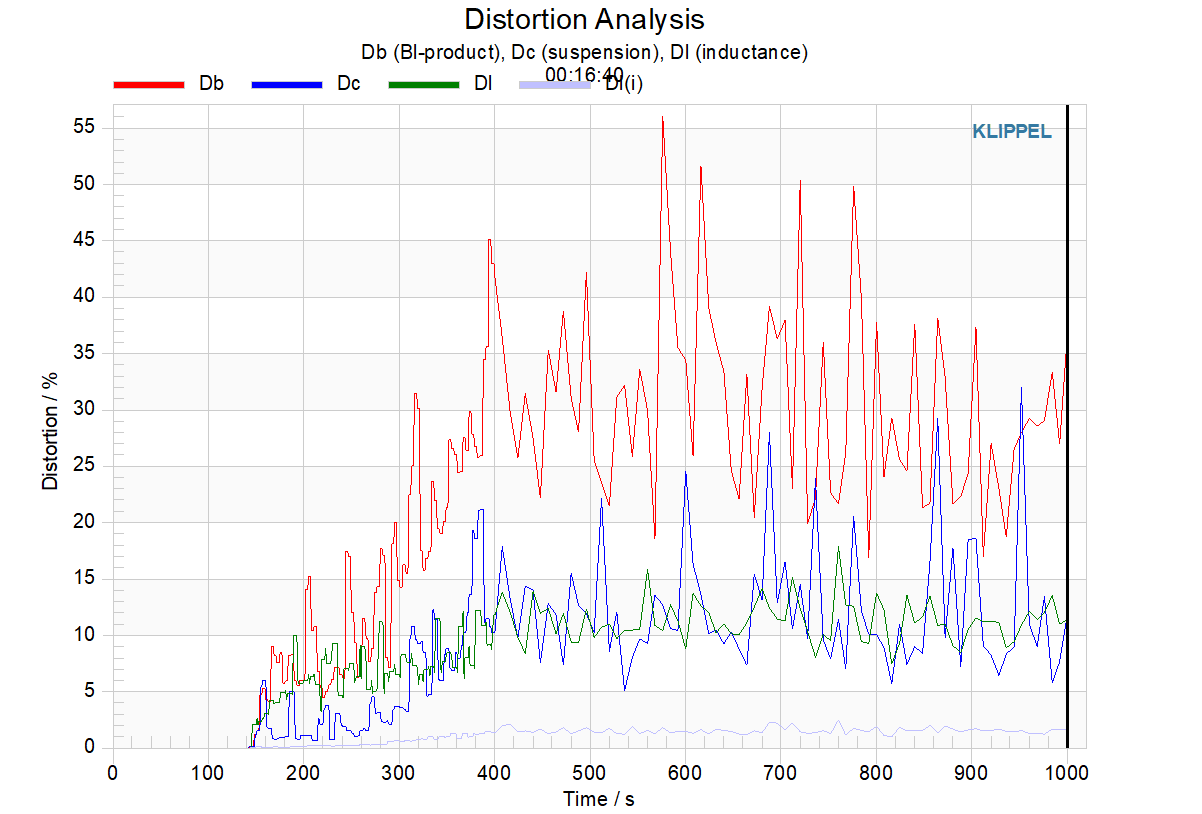
This result window shows the results of the Distortion Analysis performed during the measurement:
The relative distortion factors describe the ratio of the peak values of the distortion generated by the nonlinearity and the peak value of the total signal.
The Distortion Analysis shows the dominant nonlinearity producing the largest amount of signal distortion. This Analysis can be performed on-line while reproducing music or other signals having similar properties. The influence of the spectral properties of the excitation signal on the distortion degrees can be investigated by changing the upper cut-off frequency of the excitation signal in the CONDITION property page.
The identified model gives also access to the nonlinear distortion generated within the transducer. The simplified signal flow-chart below shows that the nonlinear mechanisms can be separated from a linear system. The signals \(p_{\text{B(x)}}(t)\) , \(p_{\text{L(x)}}(t)\) and \(p_{\text{C(x)}}(t)\) representing the nonlinear distortion from the nonlinear force factor \(Bl(x)\) inductance parameters \(L_{\text{E}}(x)\) , \(L_{2}(x)\) , \(R_{2}(x)\) and the compliance \(C_{\text{MS}}(x)\), respectively, are added to the linear signal \(p_{\text{lin}}(t)\) and are part of a feedback loop. This structure corresponds with the nonlinear differential equation implemented in real time in the DSP. In contrast to the real physical system we can directly measure the properties of each distortion components while reproducing any excitation signal such as noise, music or a multi-tone signal.
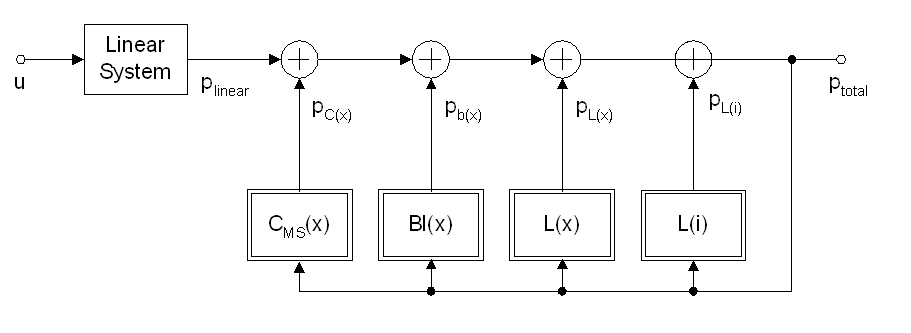
Distortion Analysis in the identified loudspeaker model
Setting the maximal peak value of the distortion signals in relation to the peak value of the total signal we can calculate the relative degree of force factor distortion
compliance distortion
and inductance distortion (versus \(x\))
and inductance distortion (versus \(i\))
for every update instant \(t_{1}\).
The time marker can be dragged with the mouse or moved with ctrl-cursor to go back in measurement history.
Displacement x(t)#
\(x(t)\)
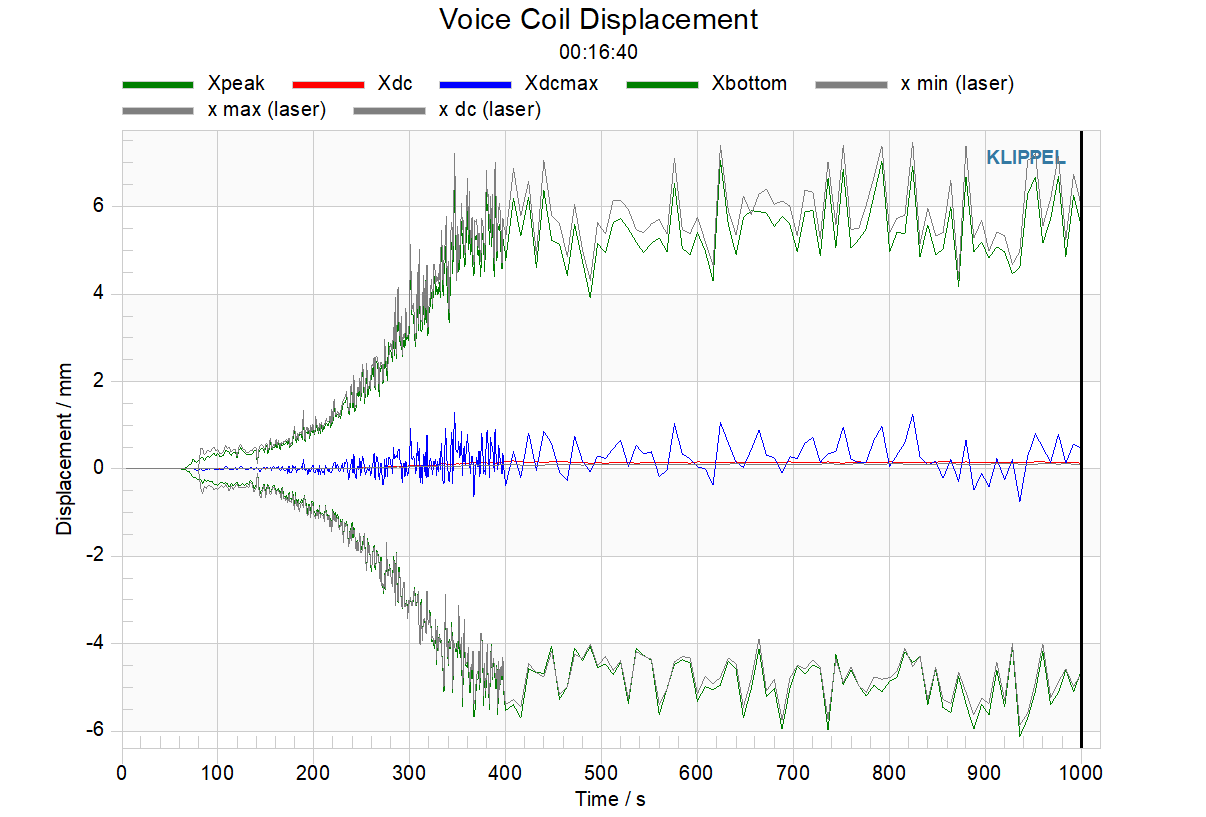
This result window shows the following statistical characteristics of the voice coil displacement versus measurement time:
Asymmetrical nonlinearities produce not only second- and higher-order distortions but also a DC-part in the displacement by rectifying low frequency components.
For an asymmetric stiffness characteristic the DC-components moves the voice coil for any excitation signal in the direction of the stiffness minimum.
For an asymmetric force factor characteristic the DC-component depends on the frequency of the excitation signal. A sinusoidal tone below with (\(f < f_{\text{s}}\)) would move the voice coil in the direction of the force factor maximum that provides some self-adjustment of the voice coil position. However, a tone above the resonance frequency (\(f > f_{\text{s}}\)) would generate a DC-component in the opposite direction, which causes unstable behavior, loss of efficiency and nonlinear distortion.
Comparing the positive and negative peak values of the displacement as shown over measurement time we find a DC-component about –0.5 mm. At high amplitudes the voice coil is dynamically shifted into a region where the suspension has a lower stiffness. Thus, positive peaks in the displacement are more frequently than negative peaks causing an asymmetric probability density function (pdf) of the displacement.
The time marker can be dragged with the mouse or moved with ctrl-cursor to go back in measurement history.
Maximal Displacement#
\(x_{\text{max}}\)
If the displacement \(x\) of the voice coil exceeds an allowed limit value \(x_{\text{max}}\) the transducer generates nonlinear distortion which cannot be tolerated in particular application or may cause a damage. The following criteria determine the definition of \(x_{\text{max}}\):
Prevention of suspension damage,
Prevention of damage of the voice coil former by hitting the back plate,
Limitation of frequency-modulation distortion produced by the sound radiation (Doppler Effect),
Limitation by nonlinear distortion caused by parameter variation
Limitation by the ability of the driver voice coil to dissipate heat.
PDF(x)#
\(PDF(x)\)
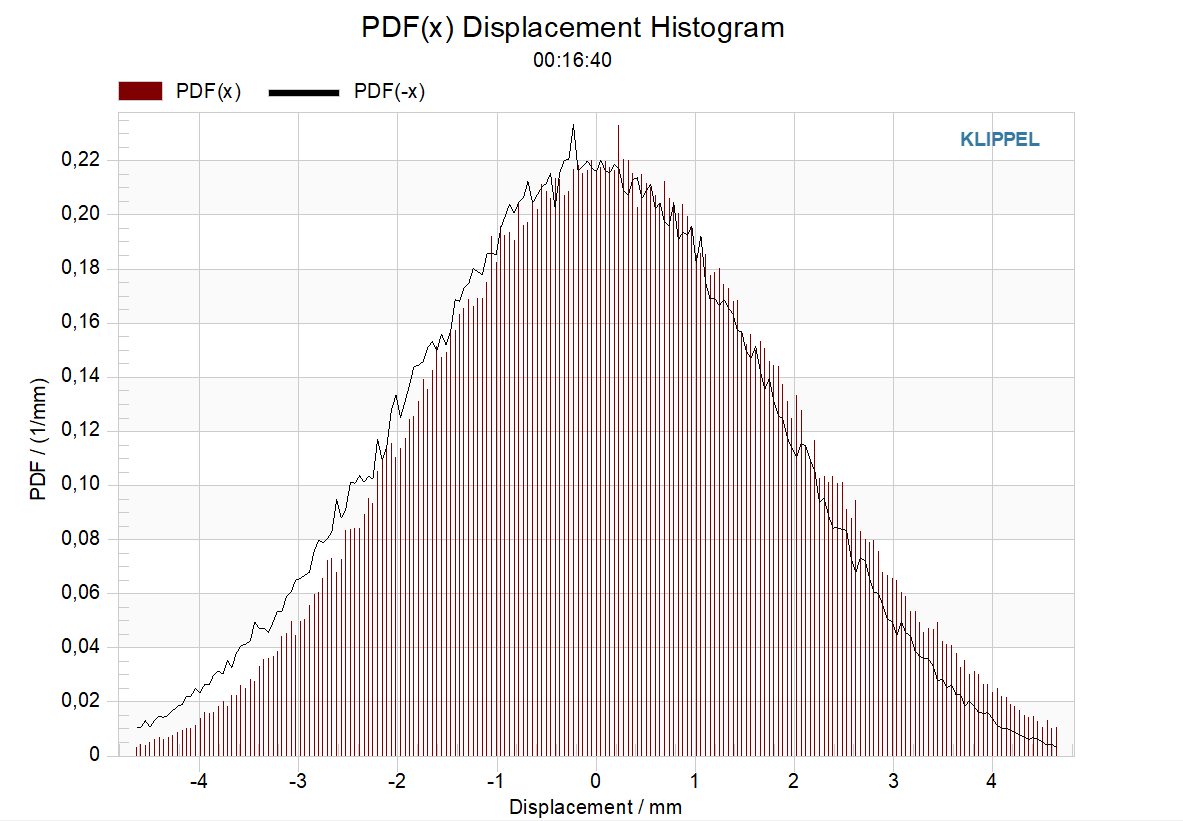
This result window shows the probability density function of the displacement signal \(pdf(x)\) recorded after the Enlargement Mode 3(7). This histogram depends on the properties of the excitation signal (noise) and on the behavior of the transducer as well.
In order to investigate the original signal properties, the probability density function of the input voltage \(pdf(u)\) can be viewed on the respective result window.
The \(pdf(x)\) is measured with test noise that is also representative for audio signals. For those signals small amplitudes of the displacement are most frequently while high amplitudes are rather rare.
The \(pdf(x)\) plays an important role as a weighting function in the nonlinear system identification and shows in which region of the displacement the nonlinear parameters are measured with highest precision. Since the dominant nonlinearities depend on the power of the displacement signal the nonlinear distortions have a small RMS-value while high peak values are generated only from time to time. In other words the crest factor of the distortions is much higher than the crest factor of the excitation signal used. This fact explains why the identification of a linear system and the nonlinearities at small displacement can be accomplished within a few seconds but the measurement of the nonlinearities at the very end of the operating range takes a few minutes.
Exciting the transducer having parameter asymmetries with a voltage signal having a symmetric probability density function \(pdf(u)\) we may find an asymmetric distribution of the \(pdf(x)\) due to the dynamic generation of DC-component in the displacement. The symmetry can easily be investigated by comparing the original \(pdf(x)\) with the curve \(pdf(x)\) mirrored at \(x = 0\).
Error(t)#
\(Error (t)\)
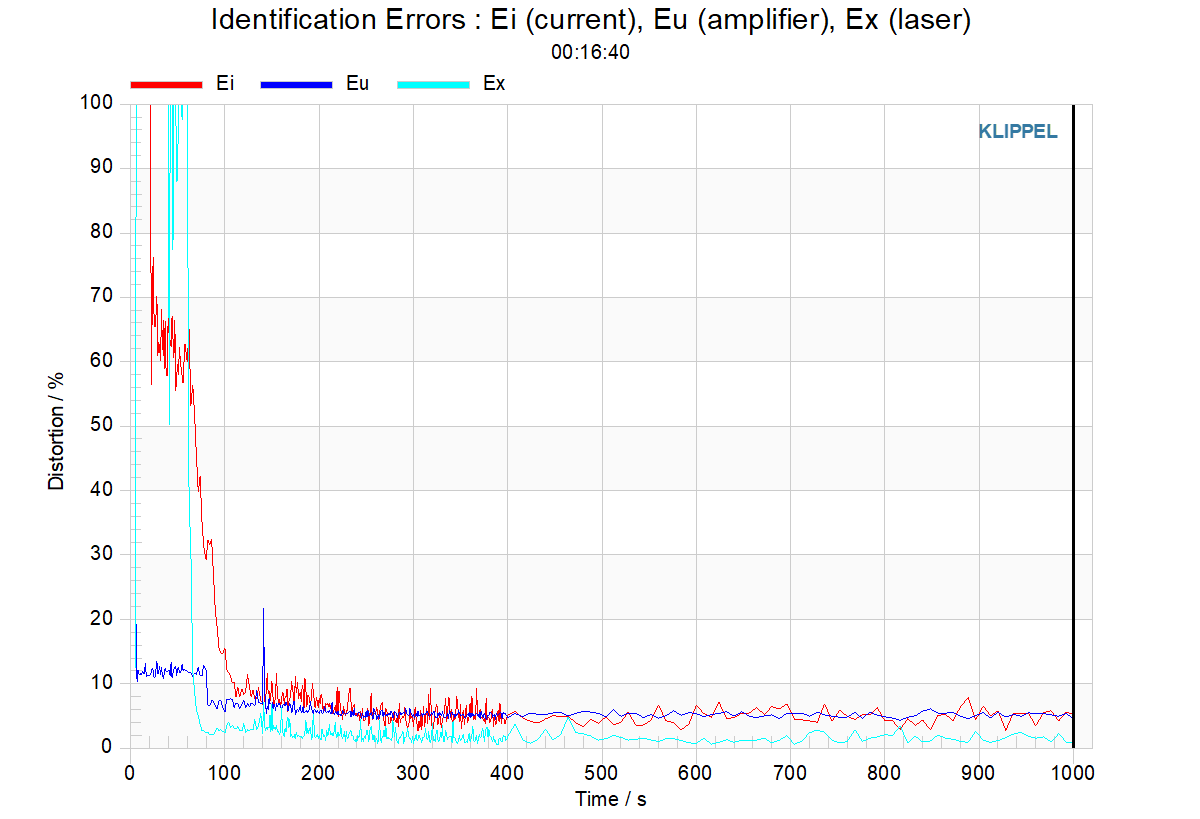
The identification process is evaluated by the following error measures:
- \(E_{i}(t)\)
Peak value of the relative error used in system identification based on current monitoring by calculating the ratio of the peak value of the current error \(e_{i}(t)\) to the peak value of the current \(i(t)\) measured during the last update interval
- \(E_{x}(t)\)
Peak value of the relative error used in system identification based on laser measurement by calculating the ratio of the peak value of the displacement error \(e_{x}(t)\) to the peak value of the displacement \(x(t)\) measured during the last update interval.
- \(E_{u}(t)\)
Peak value of the relative error used in system identification of the power amplifier by calculating the ratio of the peak value of the voltage error \(e_{u}(t)\) to the peak value of the voltage \(u(t)\) measured during the last update interval.
At the beginning of the measurement where all free parameters of the model are set to initial values the errors \(E_{i}(t)\) , \(E_{x}(t)\) and \(E_{u}(t)\) are about 100 % going down during the identification process.
The time marker can be dragged with the mouse or moved with ctrl-cursor to go back in measurement history.
Voltage Error#
\(E_{u}\)
Transducers in normal operation mode are usually driven by a low impedance source and the electric voltage at the speaker terminals can be considered as an input signal. This signal deviates from the generator output if an AC-coupled audio power amplifier is used or if the amplifier starts to limit. Therefore, the system identification also detects the transfer function of the amplifier to ensure that the amplifier works properly.
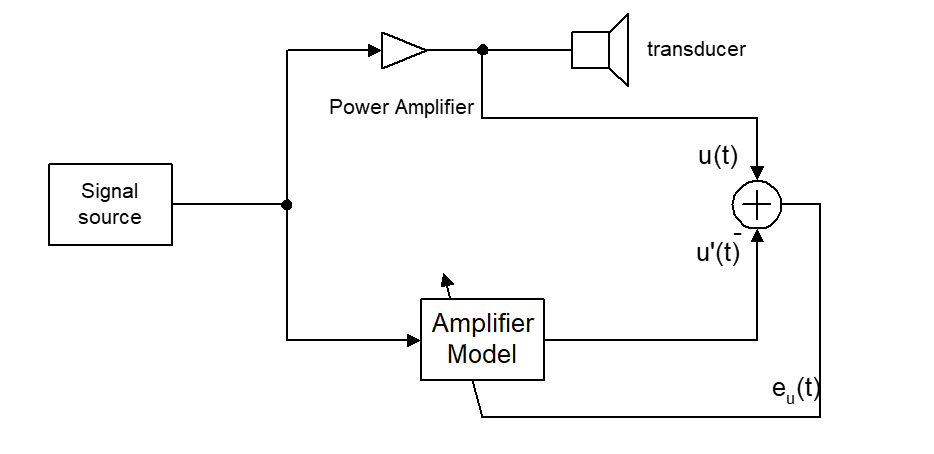 Identification of the Power Amplifier
Identification of the Power Amplifier
Thus the (Distortion Analyzer) has an amplifier model which is adapted to the real power amplifier by minimizing the error signal \(e_{u}(t) = u(t) - u'(t)\) which is the difference between the measured voltage \(u(t)\) and the estimated voltage \(u'(t)\).
The fitting of the amplifier model is described by the relative amplifier error
which is the ratio between the peak value of the error signal \(e_{u}(t)\) and the measured voltage \(u(t)\) over the last update interval. Unidentified variations in the phase and amplitude response, nonlinear distortion and measurement noise contribute to this error measure.
Current Error#
\(E_{i}\)
The system identification based on current measurement is illustrated in the signal flow chart below. Both the transducer and the model are provided with an excitation signal. The difference between measured current \(i(t)\) and estimated current \(i'(t)\) is used as error signal \(e_{i}(t) = i(t) - i'(t)\) for the adjustment of the free model parameters.
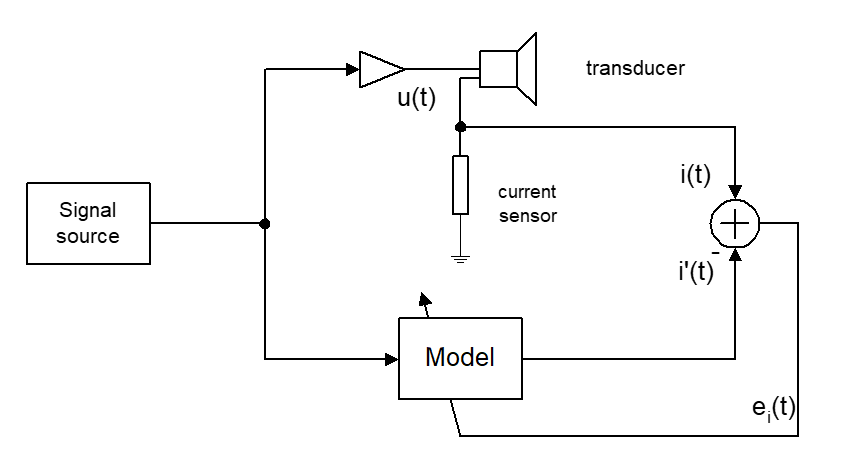 System Identification based on current monitoring
System Identification based on current monitoring
The model is optimally adjusted to the particular transducer if the magnitude of the error becomes minimal. The (Distortion Analyzer) solves this optimization problem by using an adaptive scheme as described in [34] . In this approach the transducer model is implemented in a DSP as a digital system and gradient signals are correlated with the error \(e_{i}(t)\) to update the parameter estimates.
The residual error can be evaluated by measuring the maximal relative error
which is the ratio between the peak value of the error \(e_{i}(t)\) and the current \(i(t)\) measured during the last update interval.
The reduction of the error Ei(t) starts with the beginning of the Linear Mode 3(7). The residual error is mainly caused by noise and imperfections in the modeling of the suspension (creep, hysteresis, temporal variations) and the para-inductance.
Displacement error#
\(E_{x}\)
However, monitoring the current and voltage of the transducer cannot give full identification of the mechanical parameters. Although the characteristics of the nonlinear parameters can be derived from an impedance measurement the curves can only be represented as relative parameters. To get the absolute values of the parameters (in SI units) further information is required from the mechanical domain. Following the conventional approach this information can be derived from a second measurement where an additional mass is added to the moving mass or the effective stiffness is modified by mounting the speaker in a sealed enclosure. Alternatively, it is also sufficient to monitor at least one mechanical state variable such as the displacement, velocity or acceleration and to provide this signal to the (Distortion Analyzer) while identifying the system. An inexpensive laser based on triangulation principle can be used. The laser head has to be calibrated by using the displacement calibration routine before starting the transducer measurement.
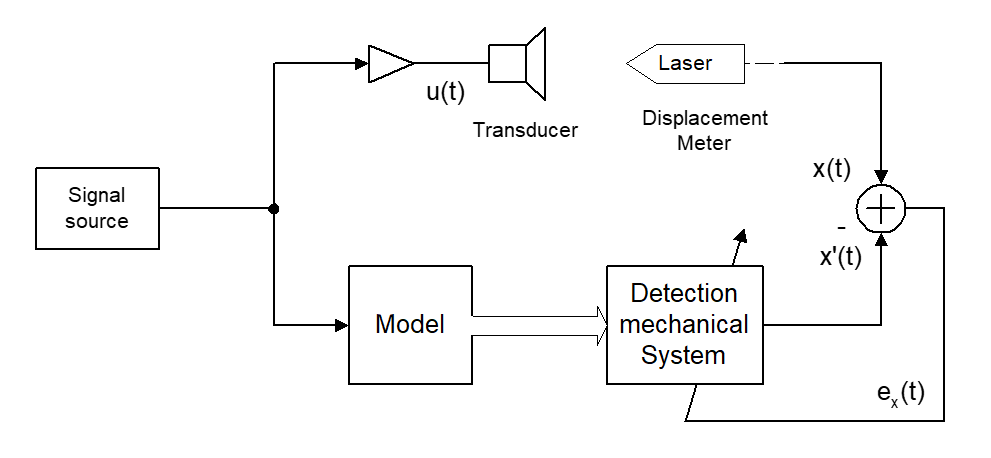 Identification of the mechanical system by displacement measurement
Identification of the mechanical system by displacement measurement
The difference between measured displacement \(x(t)\) and estimated displacement \(x'(t)\) is used as error signal \(e_{x}(t) = x(t) - x'(t)\) for the adjustment of the laser. If the error is low and the measured displacement input correlates with the internally modeled state significantly, the relative parameters are automatically transferred into absolute values.
The fitting of the laser model is described by a laser error
which is the ratio between the peak value of the \(e_{x}(t)\) and the displacement \(x(t)\) measured in the last update interval.
The error \(E_{x}(t)\) reduces if a Laser Displacement Sensor is connected to the Processing Unit and adjusted to the transducer. The residual error is mainly caused by the imperfections of the laser system (linear response, resolution, linearity) and an optimal adjustment. Please read the instructions for using the Laser Displacement Sensor carefully.
If the error \(E_{x}\) is below a threshold of 30 % the measured displacement signal is reliable and used for the identification of the mechanical parameters and states in absolute values.
Error E(x)#
\(E(x)\)
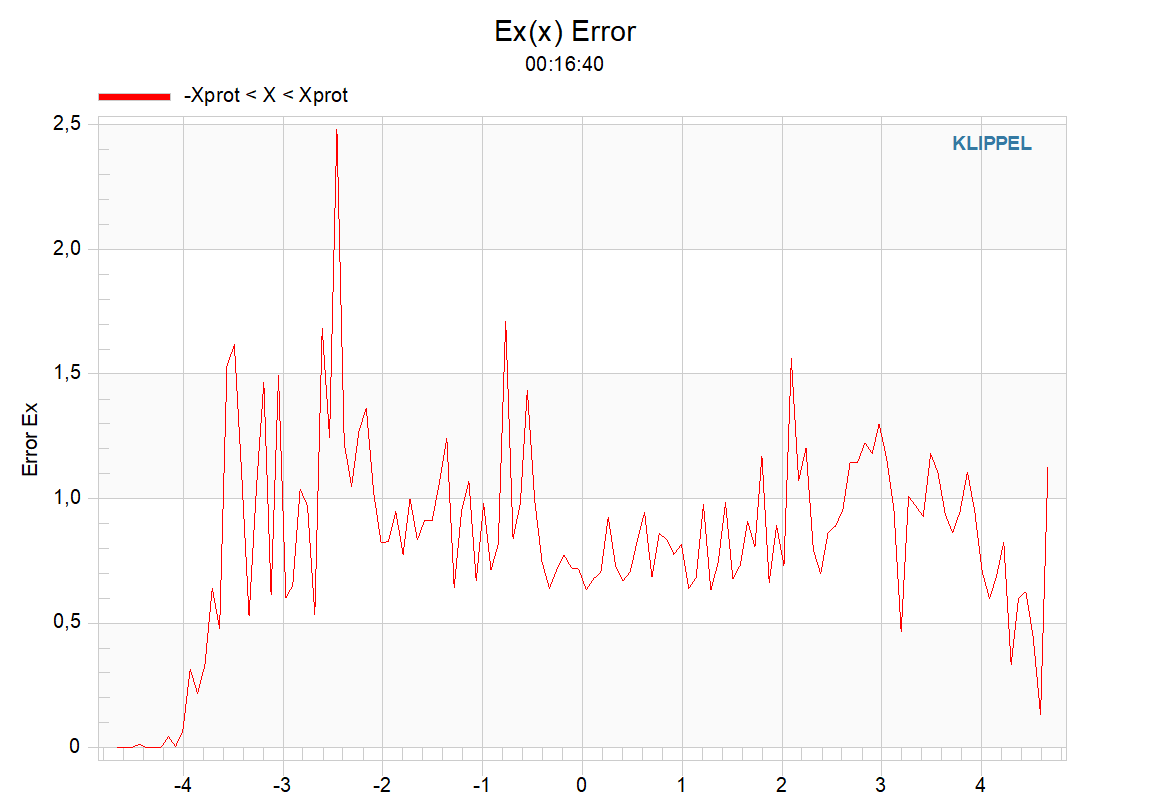
If a laser sensor head is used during a LSI measurement then this result window shows the distribution of the displacement error \(e_{x}(t)\) versus displacement \(x(t)\). This information shows more clearly mechanical limiting starting at a critical displacement value.
Variation#
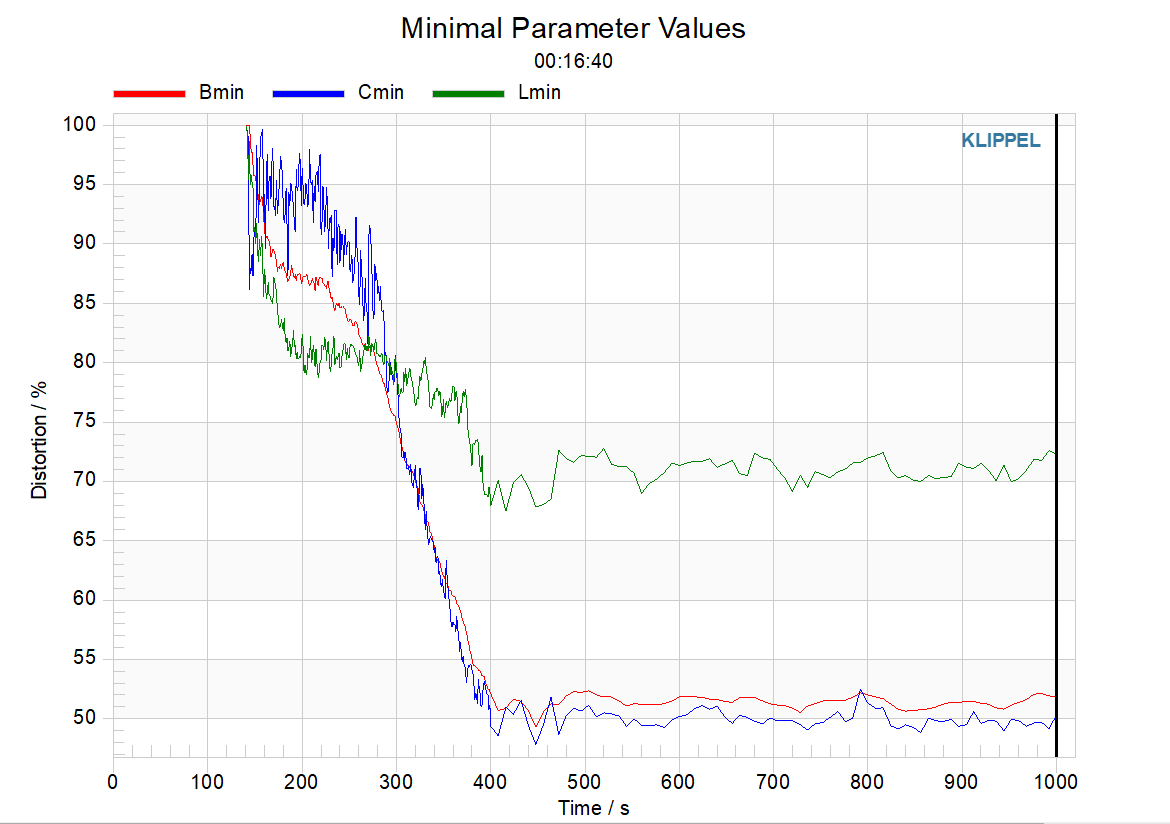
This window shows the maximal variation of the nonlinear parameters. The complicated characteristic of the nonlinear parameters is summarized to a simple one-value representation by calculating the ratio of the parameter value in the minimum and at the rest position in percent, displayed versus measurement time.
These criteria are required for detecting the working range of the transducer automatically. If the allowed working range is found these parameters are converged to specific values. These final values are helpful to find the dominant nonlinearity.
The time marker can be dragged with the mouse or moved with ctrl-cursor to go back in measurement history.
Minimal Compliance ratio#
\(C_{\text{min}}\)
The minimal compliance ratio
is a one-number representation of the nonlinear compliance neglecting the complicated shape of the curve. This value plays an important role in the determination of \(X_{\text{max}}\) and for the mechanical protection of the driver during measurement.
Minimal force factor ratio#
\(Bl_{\text{min}}\)
The minimal force factor ratio
is a one-number representation of the nonlinear \(Bl\)-product neglecting the complicated shape of the curve. This value plays an important role in the determination of \(X_{\text{max}}\) and for the mechanical protection of the driver during measurement.
Minimal inductance ratio#
\(L_{\text{min}}\)
The inductance ratio
is the ratio of the minimal parameter value in the allowed working range to the value at the rest position in percent.
Kincr(x)#
\(K_{\text{incr}}(x)\)
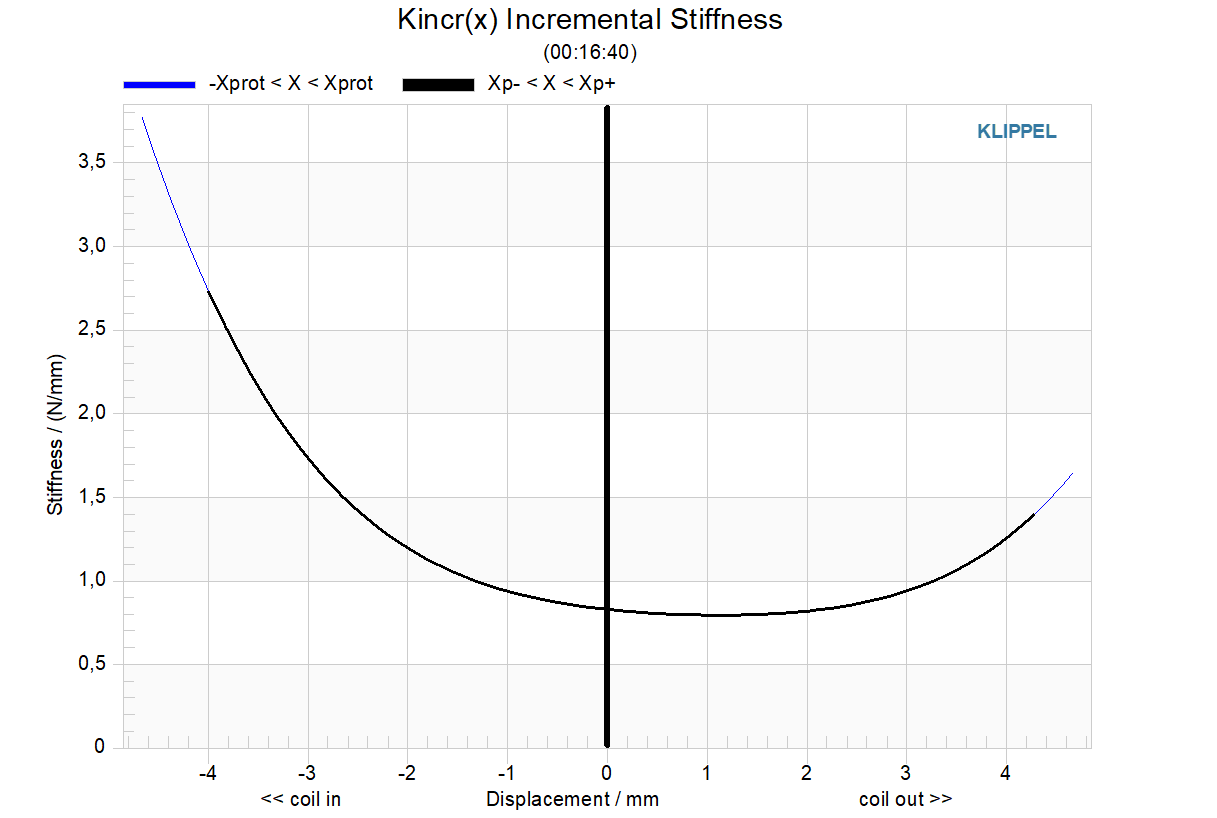
The incremental Stiffness \(K_{\text{incr}}(x)\) represents a derived nonlinear stiffness curve, which is the tangent at the working point. It is comparable to the traditional method to determine the nonlinear stiffness with a DC force to bring the DUT in the working point and a small AC measurement signal. In comparison to the nonlinear stiffness \(K_{\text{ms}}(x)\) measured with a large AC signal, represented by the secant in the working point, \(K_{\text{incr}}(x)\) curve shows a stronger increase than the \(K_{\text{ms}}(x)\) curve.
Kms(t), fs(s)#
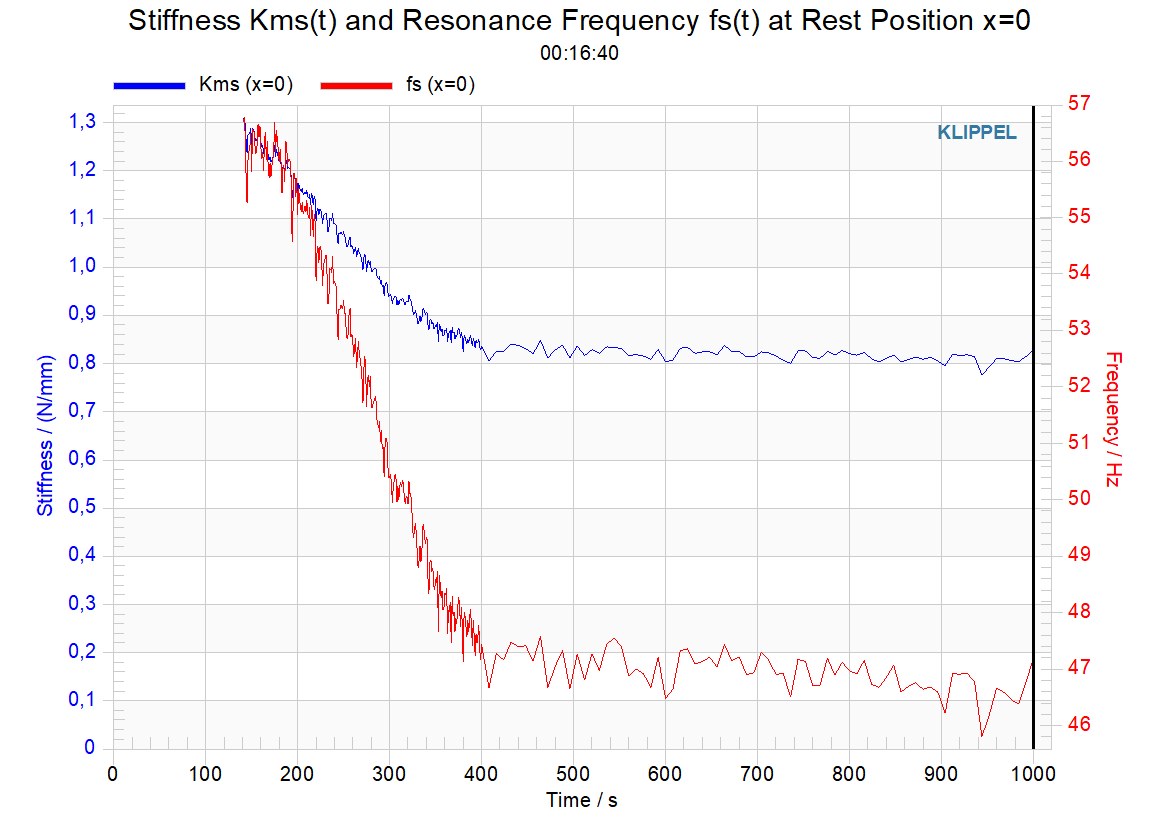
This result window shows the resonance frequency of the mechanical system \(f_{\text{s}}(t, x = 0)\) and the stiffness of the mechanical suspension \(K_{\text{MS}}(t, x = 0)\) at the rest position \(x = 0\) versus measurement time \(t\). Both parameters are closely related since the moving mass \(M_{\text{MS}}\) is assumed as constant.
Some of the parameter variations related with the mechanical suspension are reversible processes. Exposing the suspension to high excursions the stiffness at the rest position usually decreases but the parameter approaches to the initial value after reducing the amplitude of the excitation signal. This effect can be measured on most woofers that use conventional design and spider materials. It seems that the stiffness \(K_{\text{MS}}(x, t)\) should be understood as a nonlinear system having some memory in which the stiffness depends not only on the instantaneous displacement but also on the previous history of the displacement signal exposed on the suspension a few seconds before. There is more research required to confirm the hypothesis and to explain these mechanisms by a physical model.
The time marker can be dragged with the mouse or moved with ctrl-cursor to go back in measurement history.
- LSI Box
For LSI Box with an enclosure setting of sealed or vented, both \(S_{\text{D}}\) at property page DRIVER and the box volume \(V_{\text{b}}\) on property page CONDITIONS need to be set correctly. Otherwise, the chart only shows a warning:
Sd or Vb are invalid.
Note that you can change \(S_{\text{D}}\) and \(V_{\text{b}}\) after the measurement is complete. However, enclosure type must be set before the measurement.
RE(t) , QES(t)#
\(R_{\text{E}}(t)\)
\(Q_{\text{ES}}(t)\)
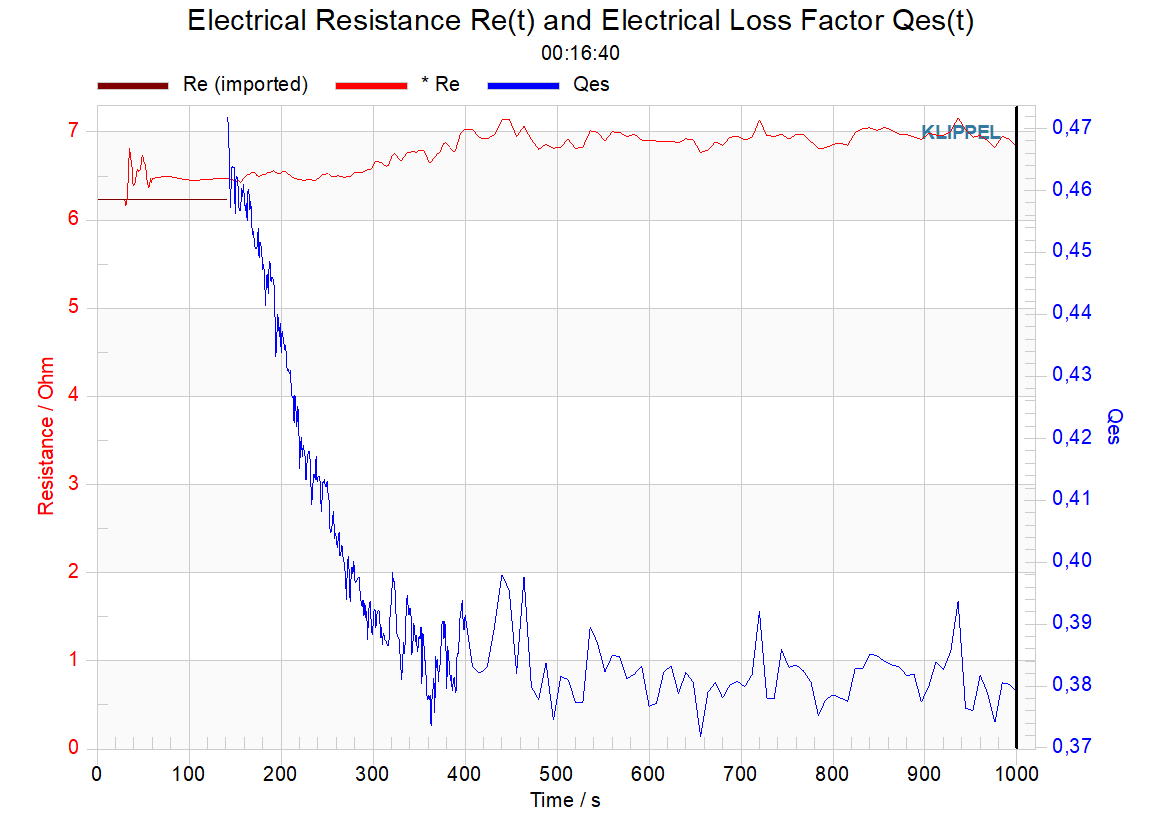
This result window shows the voice coil resistance \(R_{\text{E}}(t)\) and the related loss factor \(Q_{\text{ES}}(t, x = 0)\) at the rest position \(x = 0\) versus the measurement time. First estimates on both parameters are available at the end of the Linear Mode 3(7). In the Enlargement Mode 4(7) the amplitude of the excitation signal is increased and both parameters rise with the temperature of the voice coil.
The time marker can be dragged with the mouse or moved with ctrl-cursor to go back in measurement history.
Efficiency#
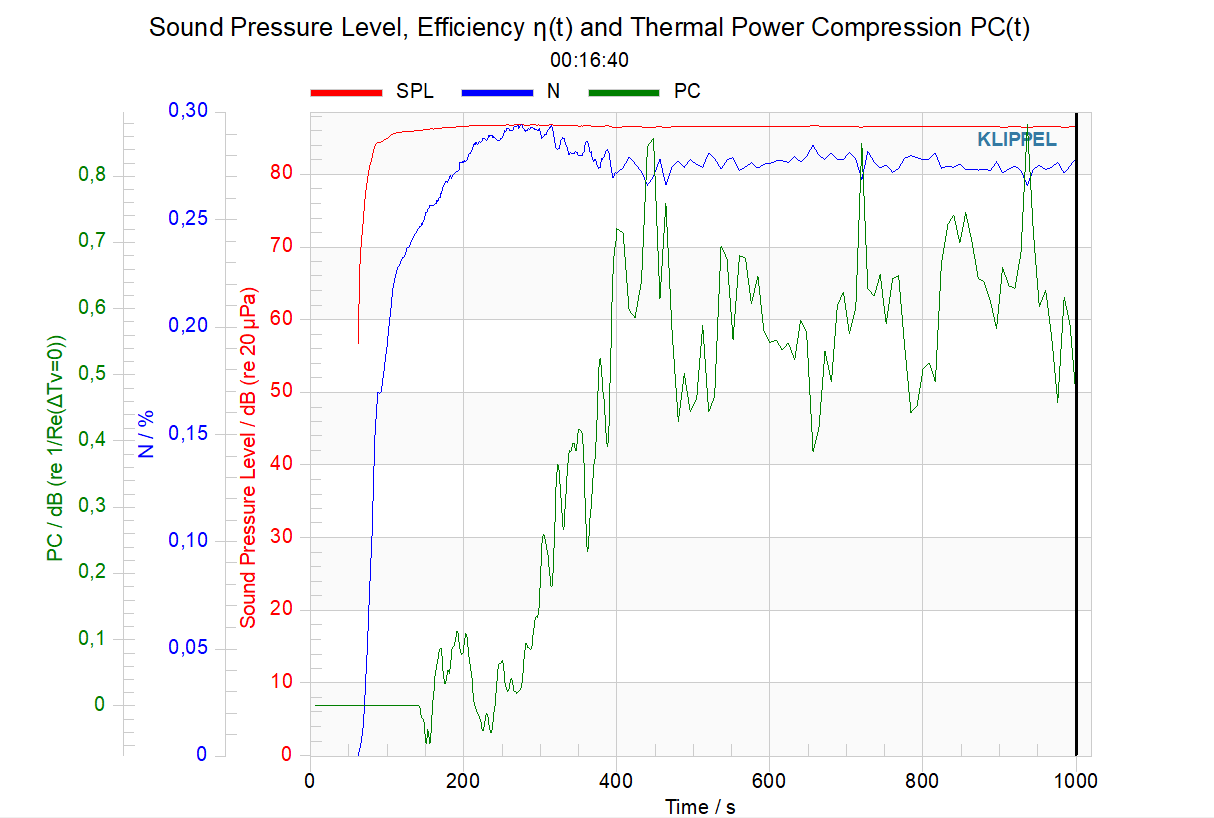
This result window shows the reference efficiency \(\eta_{0}(t)\), reference sound pressure level \(L_m(t)\) and thermal power compression factor \(PC(t)\) versus measurement time. The parameter variations are mainly caused by heating, ageing and other reversible or non-reversible changes.
The time marker can be dragged with the mouse or moved with ctrl-cursor to go back in measurement history.
Efficiency#
The reference efficiency \(\eta_{0}\) of a driver mounted in an infinite baffle and radiating into a half space free field can be calculated from the parameters at the rest position \(x = 0\)
using density \(\rho_{0}\) of air , velocity \(c\) of sound.
Considering heating of voice coil temperature versus time \(t\):
Sensitivity#
The driver mounted in an infinite baffle will produce a sound pressure level \(L_m\) for an electrical input power of 1 W at 1 m distance of
Thermal power compression#
Thermal power compression PC is calculated by considering the variation of the voice coil resistance \(R_{\text{e}}\)
Remedies for Transducer Nonlinearities#
The identified large-signal parameters show the physical cause of the distortion. The characteristic of each nonlinearity can be discussed in respect to asymmetrical and symmetrical parameter variations.
The asymmetrical variations of the parameters produce not only second-, third- and higher-order distortion in the acoustic output signal but generate also a DC-part in the voice coil displacement which moves the voice coil dynamically outside the gap and causes for unstable behavior. If these asymmetries are either caused by an offset in the voice coil position or of the working point in the suspension the transducer can be easily improved at low costs.
Asymmetry of the Force Factor Characteristic#
The asymmetry of the \(Bl(x)\) initiates a rectification of the AC signal, which generates a DC displacement that moves the coil away from the \(Bl\)-maximum and dynamically increases the asymmetry. This process is the cause of loudspeaker instability and excessive 2nd-order harmonic and intermodulation distortion.
Symmetry Point \(s_{\text{sym}}\) is a simple measure for assessing the asymmetry of the force factor characteristic. This value is defined by
where \(x_{\text{sym}}\) is a virtual shift \(x_{\text{off}}\) of the coil, generating the same \(Bl\)-value for positive and negative peak displacement \(\pm x_{\text{ac}}\) as shown in Figure 11. The symmetry point \(x_{\text{sym}}\) varies with the peak displacement \(x_{\text{ac}}\) if the curve is not only shifted by a fixed offset but also has a twisted shape.
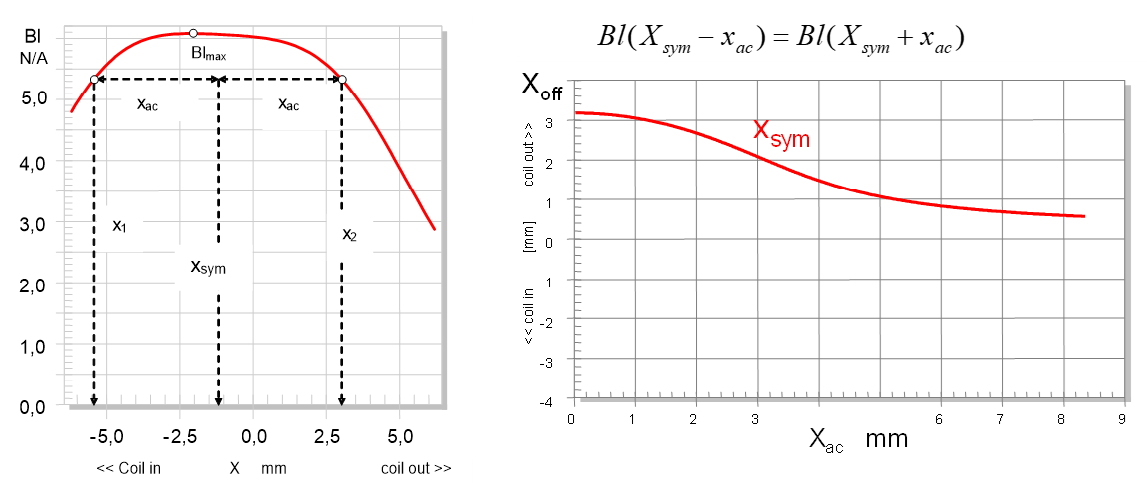
Definition of symmetry point :math:`x_{text{sym}}(x_{text{ac}}) versus peak displacement \(x_{\text{ac}}\) generated by the stimulus`
For a signal generating low peak displacement, the symmetry point indicates the maximum of the \(Bl(x)\)-curve. For high peak displacement \(x_{\text{ac}}\) the symmetry point \(x_{\text{sym}}\) describes the virtual shift \(x_{\text{off}}\) required to generate symmetrical decay of the slopes in the \(Bl(x)\)-curve. The \(Bl\) symmetry point is a useful criterion to determine the optimal rest position of the coil, considering the \(Bl\) Asymmetry \(A_{Bl}\), defined as below.
Bl Symmetry Range#
\(Bl\)
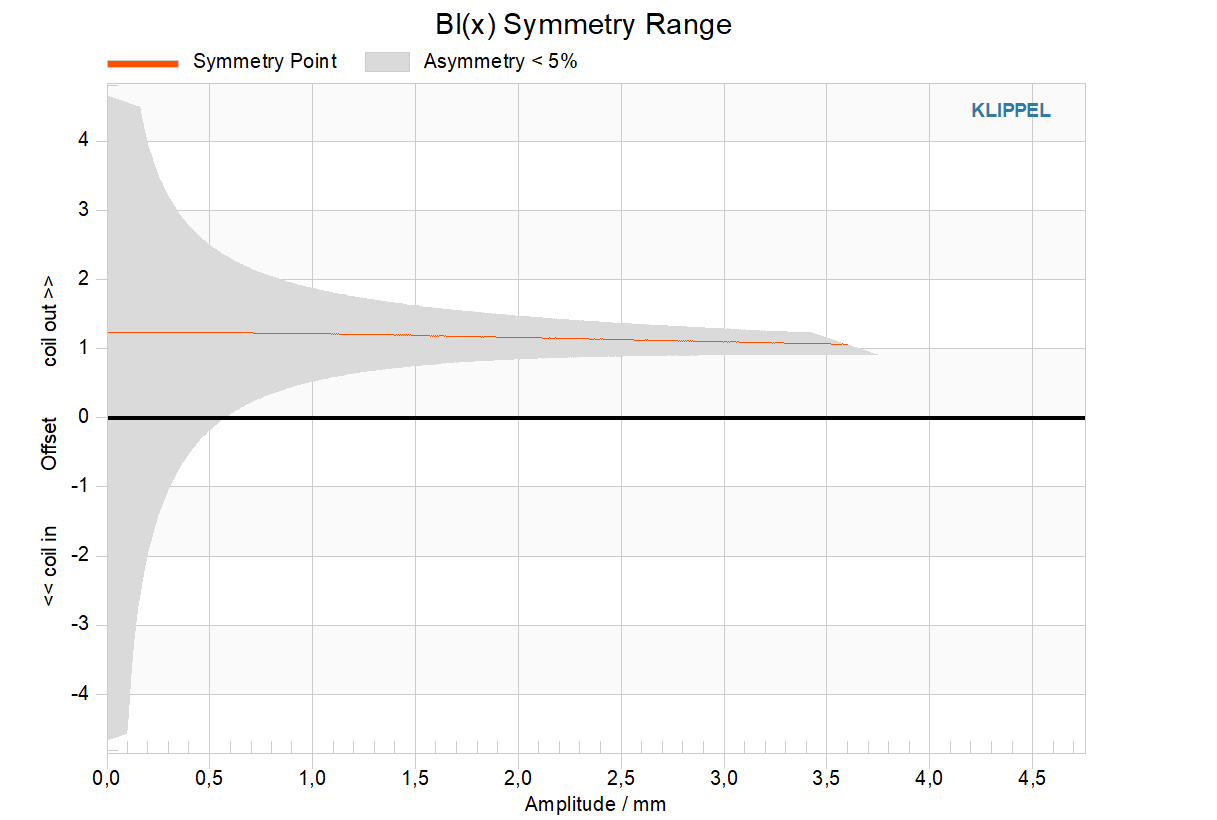
The asymmetry of the \(Bl\) curve can be evaluated by
depending on the deviation \(x_{\text{off}}\) from the coil’s rest position and the amplitude \(x_{\text{ac}}\) describing the positive and negative limits of the working range. A asymmetry is negligible if \(\vert A_{Bl} \vert < 5 \%`a so called :math:`Bl\) symmetry region can be plotted as a grey area versus \(x_{\text{off}}\) and \(x_{\text{ac}}\) in window Bl symmetry.
The peak displacement \(x_{\text{Blasym}}\) describes the amplitude \(x_{\text{ac}}\) where the \(A_{Bl} = 5 \%\) for \(x_{\text{off}} = 0\). If the voice coil displacement exceeds this value in the target application \(\vert x \vert > x_{\text{Blasym}}\) the physical cause of the \(Bl\) asymmetry should be investigated. (Check symmetry of the B field or the rest position of the coil!)
In this example above the voice coil offset has only a small effect as long as the peak displacement \(x < x_{\text{Blasym}} = 1 mm\).
Symmetry Point#
The dashed line shows the symmetry point of the \(Bl\)-curve. Ideally, this coincides with the \(x\) axis.
The symmetry point in the nonlinear \(Bl\)-curve is where a negative and positive displacement \(x\) will produce the same force factor
Where \(x_{\text{Bb}}\) is the voice coil shift to symmetrize \(Bl\) for the amplitude \(x\).
The symmetry point will not be displayed in regions where it isn’t unique. This may occur when \(Bl(x)\) has an unusual shape, or needs better identification.
Please find more information in the Application Notes Optimal Voice Coil Rest Position, Application Note 1 (10/2001).
Kms Symmetry Range#
\(K_{\text{ms}}\)
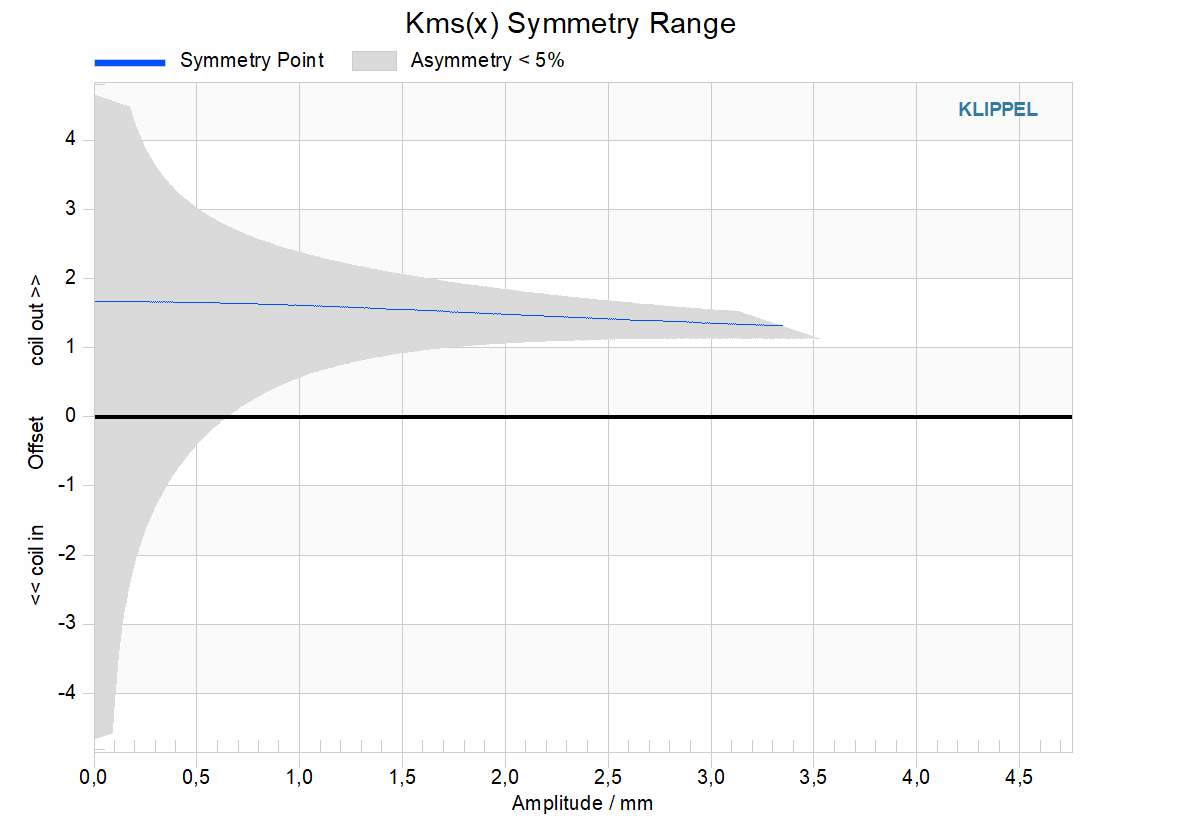
The \(K_{\text{ms}}\) Symmetry range displays the area where \(K_{\text{ms}}\) variation is below 5 %, as function of displacement amplitude (\(x\) axis) and Voice coil offset (\(y\) axis).
For the desired amplitude working range, the \(x\) axis (\(y = 0\)) should be completely within the symmetry range. In this case, asymmetries of \(K_{\text{ms}}\) can be neglected.
The asymmetry of the \(K_{\text{ms}}(x)\)-curve can be assessed by a single value:
If the Symmetry region is parallel to the \(x\) axis, but does not cover it is typical for a geometrical asymmetry of the spider (cup form) or surround (half wave profile). A better adjustment of the suspension parts helps in some cases. In most cases the causes of the asymmetry has to be identified by separating spider and surround and applying FEM methods.
Please find more information in the following Application Notes:
Separating Spider and Surround, AN 2
Adjusting the Mechanical Suspension, AN 3
Suspension part measurement, AN 26
Note
For a typical \(K_{\text{ms}}(x)\)-curves (e.g. multiple local minima), this chart is not displayed. Often, this is caused by incomplete identification. In this case, increase the “Duration of nonlinear mode” in the Conditions property page.
Symmetry Point#
The dashed line shows the symmetry point of the \(K_{\text{ms}}\)-curve. Ideally, this coincides with the \(x\) axis.
The symmetry point in the nonlinear \(K_{\text{ms}}`curve is where a negative and positive displacement :math:`x\) will produce the same stiffness
Where \(x_{\text{B}}\) is the voice coil shift to symmetrize \(K_{\text{ms}}\) for the amplitude \(x\).
The symmetry point will not be displayed in regions where it isn’t unique. This may occur when \(K_{\text{ms}}(x)\) needs better identification.
Setup Parameters#
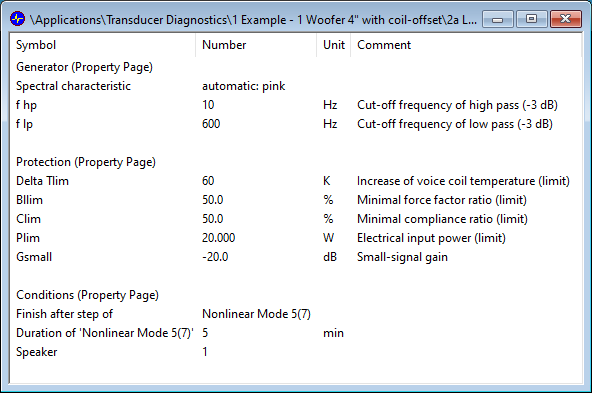
This window gives a summary on all setup parameters defined by the user. You find a detailed description under property pages of LSI.
Controlling the Time Cursor#
All time-dependent graphs contain a time cursor (vertical black bar), that is typically positioned at the end of the measurement.
The cursor can be dragged with the mouse, or moved with the following keys:
- CTRL + Cursor Left / Right ◄ / ►
Move to previous / next sample point
- CTRL + Home / End
Move to first / last sample
- CTRL + Page Up / Page Down
Move left / right in larger steps (depends on number of data points)
- CTRL + Click into the diagram
Move the cursor to the nearest sample
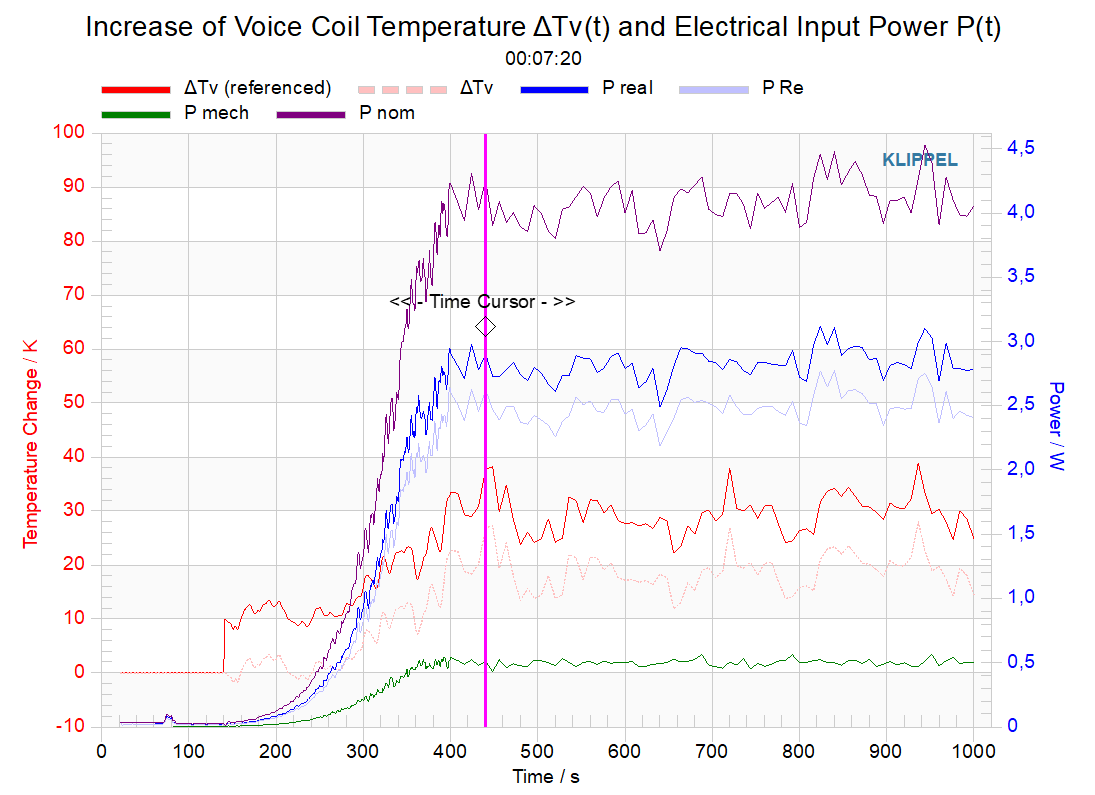
The time cursor (vertical line) will change from black to pink if it was moved manually.
All other windows will follow the time cursor show the state of the measurement at the selected time. So, you can inspect changes over time, and the adaption process. E.g. you can monitor the current working range (black curve in the \(Bl(x)\) , \(C_{\text{MS}}(x)\) , \(K_{\text{MS}}(x)\) , \(L_{\text{e}}(x)\) windows) changing with different amplitudes.
Note
To visualize compliance changes, you can set the cursor to ca. \(\frac{1}{3}^{rd}\) of the enlargement mode, copy the \(C_{\text{MS}}(x)\)-curve, to the clipboard, paste it back into the \(C_{\text{MS}}(x)\)-graph as passive curve, then set the time cursor back to the end of the measurement. You will see both \(C_{\text{MS}}(x)\)-curves (from early enlargement mode, and final) side by side. For more information on copying and pasting curves, see the dB-Lab manual.
Supported Modules for Im/Export#
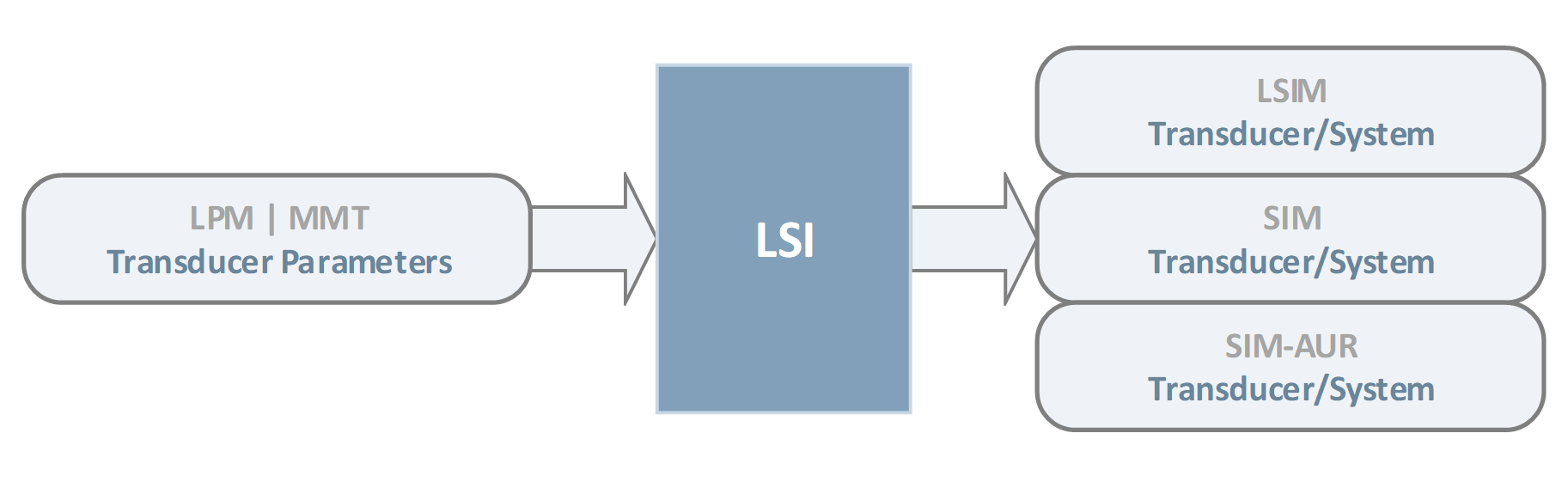
Malfunction and Troubleshooting#
Overview#
This chapter will provide information that can help you solve common problems that occur with LSI measurements.
If you cannot find a description here that matches your problem, try these options:
Check the release notes Known Software and Documentation Problems that you received with your (Distortion Analyzer) products. This document contains the most up-to-date information about products and installation procedures.
Contact us via KLIPPEL support
Software Messages#
No Device-Dependent Calibration#
- Error message:
“No device dependent calibration data used, only default values!”
- Reason:
The Hardware unit is not calibrated. All results acquired are invalid.
- Solution:
Choose Cancel to cancel the measurement. Switch the hardware unit off, and on again, and start the measurement again.
If the error occurs again, contact KLIPPEL support or your local distributor for calibration of the hardware unit.
Data already available#
- Error message:
Data is already available. If you continue, this data will be discarded!
- Reason:
You are changing a setup parameter that has an effect on the measurement results. (e.g., changing the stimulus parameters).
- Solution:
Click Cancel to keep the results with their original setup. Click OK to discard the previous measurement results and accept the setup change.
New measurement active#
- Error message:
A new measurement is active in the (Distortion Analyzer). Please start the corresponding operation to reconnect with the device.
- Reason:
The operation running in the hardware unit has been changed by external means (standalone, second instance of dB-Lab, etc.).
- Solution:
The operation that displays this message will disconnect from the hardware unit, allowing the new operation to continue.
Sd or Vb are invalid#
- Error message:
Displayed in the charts Stiffness \(K_{\text{ms}}(x)\) , Compliance \(C_{\text{ms}}(x)\) and Stiffness \(K_{\text{ms}}(t)\). Sd on property page DRIVER and Vb on property page CONDITIONS must be set correctly for all values to be displayed.
Hardware Messages#
Warnings and Exception messages generated by the hardware unit are displayed in the State result window. Important messages are additionally displayed in a pop-up box while the measurement is running.
Output DAC limits#
- Cause:
The signal at the Output 1 of the Distortion Analyzer exceeds the allowed limit.
- Remedy
To provide sufficient amplitude at the speaker’s terminal in the large signal domain the gain of the external power amplifier should be augmented (increase the gain control at the power amplifier or operate the stereo amplifier in bridged mode). Then start the measurement again.
Amplifier limits#
- Cause:
The output signal of the power amplifier is limiting.
- Remedy:
Please use an amplifier with higher output capability or operate a stereo amplifier in bridged mode. Then repeat the measurement.
Maximal output gain#
- Cause:
The gain \(G_{\text{large}}\) increased in the large signal domain by the automatic gain adjustment exceeds the allowed maximal value (26 dB). The protection variables have not yet exceeded the allowed protection limits.
- Remedy:
Stop the measurement. Increase the amplitude of the excitation signal in the small signal domain by increasing \(G_{\text{small}}\) in the property page PROTECTION or increase the gain control at your power amplifier. Then start the measurement again.
Minimal output gain#
- Cause:
The protection variables exceed the allowed protection limits in the small signal domain (\(G_{\text{large}} = 0 dB\)). Thus the amplitude of the excitation signal is too high in the small signal domain.
- Remedy:
Stop the measurement. Decrease the amplitude of the excitation signal in the small signal domain by attenuating \(G_{\text{small}}\) in the property page PROTECTION or decrease the gain control at your power amplifier. Then start the measurement again.
Driver fs too high#
- Cause:
The instantaneous resonance frequency of the driver is above the maximal value. This problem may occur if a midrange or tweeter driver is measured by using LSI woofer.
- Remedy:
If you are using the LSI woofer use the LSI tweeter instead which is capable of measuring most of the tweeter, microspeaker and midrange driver. In some cases it is possible to reduce the resonance frequency of the transducer by adding an additional mass to the diaphragm and to accomplish a successful LSI woofer measurement.
Driver fs too low#
- Cause:
The instantaneous resonance frequency of the driver is below the allowed minimal value. This problem may occur if a woofer is measured by using a LSI tweeter.
- Remedy:
If you are using the LSI tweeter use the LSI woofer instead which is capable of measuring most of the subwoofer, woofers or shakers with a low resonance frequency. In some cases it is possible to increase the resonance frequency by placing the driver in a sealed enclosure to accomplish a successful LSI tweeter measurement.
Driver Re too high#
- Cause:
The electrical resistance of the voice coil is above the maximal limit.
- Remedy:
Check if the unit to test is connected to the Klippel Analyzer. After starting the operation, the test signal should be audible.
For high resistance drivers, connect transducer to Speaker 2 at rear of Distortion Analyzer, and change setup to use Speaker 2 (requires high sensitivity sensors on channel 2).
Driver Re too low#
- Cause:
The electrical resistance of the voice coil is below the allowed minimum.
- Remedy:
Connect transducer to Speaker 1 at rear of Distortion Analyzer.
- Cause:
The current at the driver’s terminals is too low. Usually the driver is not connected to the terminal SPEAKER 1.
- Remedy:
Make sure that the driver is connected properly to the processing unit. Restart the measurement.
Low Amplifier Output#
- Cause:
The voltage measured at the output of the power amplifier is too low. Usually the power amplifier is switched off or the amplifier gain is set too low. If displayed in the Time Delay Mode also a signal processing latency larger than the allowed maximum from the specification could cause the message.
- Remedy:
Check the power amplifier and restart the measurement. Check the amplifier routing to both speaker channels. If it works at SPEAKER 1 but fails at SPEAKER 2 the input and output signal routing of the second amplifier channel has be checked.
General Exception#
- Cause:
A problem in the digital signal processing has been detected.
- Remedy:
Please save this measurement (copy the database) and contact KLIPPEL support. Generate a new object and repeat the measurement.
Temperature too high#
- Cause:
The increase of the voice coil temperature exceeds the defined limit defined on the PROTECTION page of the LSI module. This might occur during the Thermal mode where the gain control \(G_{\text{large}}\) is disabled or if the measurement has not been started in the small signal domain and the gain is set to the minimum (\(G_{\text{large}} = 0\)).
- Remedy:
If the gain control is at minimum (\(G_{\text{large}} = 0\)) then start the measurement at lower signal amplitude (reduce \(G_{\text{small}}\)). If the exception occurred during Thermal Mode then use other limit parameters (\(Bl_{\text{lim}}\) , \(C_{\text{lim}}\) , \(P_{\text{lim}}\)) to restrict the working range at lower amplitude.
Change Noise Spectrum#
- Cause:
The identification of the loudspeaker parameters requires sufficient excitation of the driver. Persistent excitation of a driver with a resonance frequency \(f_{\text{s}}\) can be assured for band-pass filtered noise if the cut-off frequency of the high-pass \(f_{\text{hp}} < f_{\text{s}}\) and the cut-off frequency of the low-pass \(f_{\text{lp}} = 10 \cdot f_{\text{s}}\).
- Remedy:
Enable the automatic noise adjustment or adjust the noise manually on the property page GENERATOR. Repeat the measurement.
High Fitting Error#
- Cause:
The difference (error \(E_{\text{i}}\)) between measured and estimated current is a measure for the fitting of model. A driver with regular properties which corresponds with the model produces an error 5 … 20 %. A higher value of \(E_{\text{i}}\) as shown on the PP STATE indicates a poor fitting. In most cases it is caused by a high value of the voice coil inductance and irregular impedance response due to the para-inductance. Additional elements such as crossover, a second transducer (tweeter) in parallel connection is also not considered in the modeling and will increase the residual error.
- Remedy:
Enable the automatic noise adjustment or adjust the noise manually on the property page GENERATOR. Repeat the measurement. Remove additional elements from the transducer.
f HP Amplifier too high#
- Cause:
The external power amplifier used has a high highpass frequency (> 15 Hz) which attenuates the pilot tone (about 1 Hz) used for the temperature measurement.
- Remedy:
Replace the power amplifier or disable the high-pass filter in the power amplifier.
ADC limiting (sensor)#
- Cause:
The peak value of the measured current or voltage signal is too high and the analog to digital converter is limiting.
- Remedy:
If your hardware is configured with a low and a high current sensor, and you are measuring on the low current sensor, repeat the measurement on the higher current channel. Usually, Speaker 2 is configured with a low current sensor (5 A).
Consult KLIPPEL support to modify the sensors on the hardware platform able to measure higher signal.
Thermal parameters cannot be measured by current stimulus#
- Cause:
The automatic identification of the thermal parameters in the LSI performs a series of tests using different kinds of stimuli to generate significant variation in voice coil temperature depending on the supplied electrical power causing a heating of the voice coil and voice coil displacement causing a force convection cooling. If the temperature variations are small and the measurements corrupted by measurement noise some parameters cannot be detected at high accuracy. In this case the affected thermal parameter will not be displayed and a warning will be generated.
- REMEDY:
Increase the target temperature T_lim and the maximal input power P_lim and reduce the nonlinear protection parameters Bl_lim and C_lim on the property page PROTECTION and repeat the LSI measurement using a higher input power.
Literature#
[2] R. H. Small, „Direct~Radiator Loudspeaker System Analysis,“ J. Audio Eng. Soc., vol. 20, pp. 383 – 395 (1972 June).
[3] R.H. Small, „Closed-Box Loudspeaker Systems, Part I: Analysis,“ J. Audio Eng. Soc., vol. 20, pp. 798 – 808 (1972 Dec.).
[4] A. N. Thiele, „Loudspeakers in Vented Boxes: Part I and II,“ in Loudspeakers, vol. 1 (Audio Eng. Society, New York, 1978).
[5] J. R. Ashley and M. D. Swan, „Experimental Determination of Low-Frequency Loudspeaker Parameters,“ in Loudspeakers, vol.1 (Audio Eng. Society, New York, 1978).
[6] R. H. Small, “Assessment of Nonlinearity in Loudspeakers Motors,” in IREECON Int. Convention Digest (1979 Aug.), pp. 78-80.
[7] M.R. Gander, “Moving-Coil Loudspeaker Topology as an Indicator of Linear Excursion Capability,” in Loudspeakers, vol.2 (Audio Engineering Society, New York, 1984).
[8] A. Dobrucki, C. Szmal, “Nonlinear Distortions of Woofers in Fundamental Resonance Region,” presented at the 80th convention Audio Eng. Soc., Montreux, March 4-7, 1986, preprint 2344.
[9] C. Zuccatti, “Thermal Parameters and Power Ratings of Loudspeakers,” J. Audio Eng. Soc., vol. 38, pp. 34 – 39, (Jan./Feb. 1990).
[10] D. Button, “A Loudspeaker Motor Structure for Very High Power Handling and High Linear Excursion,” J. Audio Eng. Soc., vol. 36, pp. 788 – 796, (October 1988).
[11] C. A. Henricksen, “Heat-Transfer Mechanisms in Loudspeakers: Analysis, Measurement, and Design,” J. Audio Eng. Soc., vol. 35, pp. 778 – 791, (October 1987).
[12] W. Klippel, “Dynamic Measurement and Interpretation of the Nonlinear Parameters of Electrodynamic Loudspeakers,” J. Audio Eng. Soc., vol. 38, pp. 944 - 955 (1990).
[13] E. R. Olsen and K.B. Christensen, “Nonlinear Modeling of Low Frequency Loudspeakers - a more complete model,” presented at the 100th convention Audio Eng. Soc., Copenhagen, May 11-14, 1996, preprint 4205.
[14] M.H. Knudsen and J.G. Jensen, “Low-Frequency Loudspeaker Models that Include Suspension Creep,” J. Audio Eng. Soc., vol. 41, pp. 3 - 18, (Jan./Feb. 1993).
[15] A. Dobrucki, “Nontypical Effects in an Electrodynamic Loudspeaker with a Nonhomogeneous Magnetic Field in the Air Gap and Nonlinear Suspension,” J. Audio Eng. Soc., vol. 42, pp. 565 - 576, (July./Aug. 1994).
[16] A. J. M. Kaizer, “Modeling of the Nonlinear Response of an Electrodynamic Loudspeaker by a Volterra Series Expansion,” J. Audio Eng. Soc., vol. 35, pp. 421-433 (1987 June).
[17] W. Klippel, “Nonlinear Large-Signal Behavior of Electrodynamic Loudspeakers at Low Frequencies,” J. Audio Eng. Soc , vol. 40, pp. 483-496 (1992).
[18] J.W. Noris, “Nonlinear Dynamical Behavior of a Moving Voice Coil,” presented at the 105th Convention of the Audio Engineering Society, San Francisco, September 26-29, 1998, preprint 4785.
[19] W. Klippel, “The Mirror Filter - A New Basis for Reducing Nonlinear Distortion and Equalizing Response in Woofer Systems,” J. Audio Eng. Soc., vol. 40, pp. 675 - 691 (1992).
[20] J. Suykens, J. Vandewalle and J. van Gindeuren, “Feedback Linearization of Nonlinear Distortion in Electrodynamic Loudspeakers,” J. Audio Eng. Soc., Vol. 43, No. 9, pp. 690-694 (1995).
[21] W. Klippel, “Direct Feedback Linearization of Nonlinear Loudspeaker Systems,” J. Audio Eng. Soc., Vol. 46, pp. 499-507 (1995 June).
[22] H. Schurer, C. H. Slump, O.E. Herrmann, “Theoretical and Experimental Comparison of Three Methods for Compensation of Electrodynamic Transducer Nonlinearity,” Audio Eng. Soc., Vol. 46, pp. 723-739 (1998 September).
[23] F.Y. Gao, “Adaptive Linearization of a Loudspeaker,” presented at 93rd Convention of the Audio Eng. Soc., October 1 -4, 1992, San Francisco, preprint 3377.
[24] W. Klippel, “Nonlinear Adaptive Controller for Loudspeakers with Current Sensor,” presented at the 106th Convention of the Audio Engineering Society, Munich, May 8-11, 1999, preprint 4864.
[25] W. A. Frank, “An Efficient Approximation to the Quadratic Volterra Filter and its Application in Real-Time Loudspeaker Linearization,” Signal Processing, vol. 45, pp. 97-113, (1995).
[26] D. Clark, „Precision Measurement of Loudspeaker Parameters,“ J. Audio Eng. Soc. vol. 45, pp. 129 - 140 (1997 March).
[27] E. Geddes and A. Philips, “Efficient Loudspeaker Linear and Nonlinear Parameter Estimation,” presented at the 91st Convention of the Audio Engineering Society, J. Audio Eng. Soc. (Abstracts), vol. 39, p. 1003 (1991 Dec.), preprint 3164.
[28] D. Clark and R. Mihelich, “Modeling and Controlling Excursion-Related Distortion in Loudspeakers,” presented at the 106th Convention of the Audio Engineering Society, Munich, May 8-11, 1999, preprint 4862.
[29] D. Clark, “Amplitude Modulation Method for Measuring Linear Excursion of Loudspeakers,” presented at the 89th Convention of the Audio Engineering Society, J. Audio Eng. Soc. (Abstracts), vol. 38, p. 874 (1990 Nov.), preprint 2986.
[30] G. Cibelli, A. Bellini, E. Ugolotti, “Dynamic measurements of low-frequency loudspeakers modeled by Volterra series,” in preprint 4968 presented on 106th Convention of the Audio Eng. Soc., Munich, May 8-11, 1999.
[31] M. Knudsen, “Estimation of Physical Parameters in Linear and Nonlinear Dynamic Systems, Ph. D. dissertation, Aalborg University, Department of Control Engineering, ISNN 0106-0791, AUC-CONTROL- R93 – 4010, January 1993.
[32] M. Knudsen, J.G. Jensen, V. Julskjaer and P. Rubak, “Determination of Loudspeaker Driver parameters Using a System Identification Technique,” J. Audio Eng. Soc. vol. 37, No. 9.